12 May 2025
As the digital landscape becomes more interconnected, the frequency and
severity of zero-day attacks, have significantly increased, leading to an
urgent need for innovative Intrusion Detection Systems (IDS). Machine
Learning-based IDS that learn from the network traffic characteristics and can
discern attack patterns from benign traffic offer an advanced solution to
traditional signature-based IDS. However, they heavily rely on labeled
datasets, and their ability to generalize when encountering unseen traffic
patterns remains a challenge. This paper proposes a novel self-supervised
contrastive learning approach based on transformer encoders, specifically
tailored for generalizable intrusion detection on raw packet sequences. Our
proposed learning scheme employs a packet-level data augmentation strategy
combined with a transformer-based architecture to extract and generate
meaningful representations of traffic flows. Unlike traditional methods reliant
on handcrafted statistical features (NetFlow), our approach automatically
learns comprehensive packet sequence representations, significantly enhancing
performance in anomaly identification tasks and supervised learning for
intrusion detection. Our transformer-based framework exhibits better
performance in comparison to existing NetFlow self-supervised methods.
Specifically, we achieve up to a 3% higher AUC in anomaly detection for
intra-dataset evaluation and up to 20% higher AUC scores in inter-dataset
evaluation. Moreover, our model provides a strong baseline for supervised
intrusion detection with limited labeled data, exhibiting an improvement over
self-supervised NetFlow models of up to 1.5% AUC when pretrained and evaluated
on the same dataset. Additionally, we show the adaptability of our pretrained
model when fine-tuned across different datasets, demonstrating strong
performance even when lacking benign data from the target domain.

24 Jul 2020

In this paper, a novel multi-view methodology for graph-based neural networks
is proposed. A systematic and methodological adaptation of the key concepts of
classical deep learning methods such as convolution, pooling and multi-view
architectures is developed for the context of non-Euclidean manifolds. The aim
of the proposed work is to present a novel multi-view graph convolution layer,
as well as a new view pooling layer making use of: a) a new hybrid Laplacian
that is adjusted based on feature distance metric learning, b) multiple
trainable representations of a feature matrix of a graph, using trainable
distance matrices, adapting the notion of views to graphs and c) a multi-view
graph aggregation scheme called graph view pooling, in order to synthesise
information from the multiple generated views. The aforementioned layers are
used in an end-to-end graph neural network architecture for graph
classification and show competitive results to other state-of-the-art methods.
01 Jun 2021
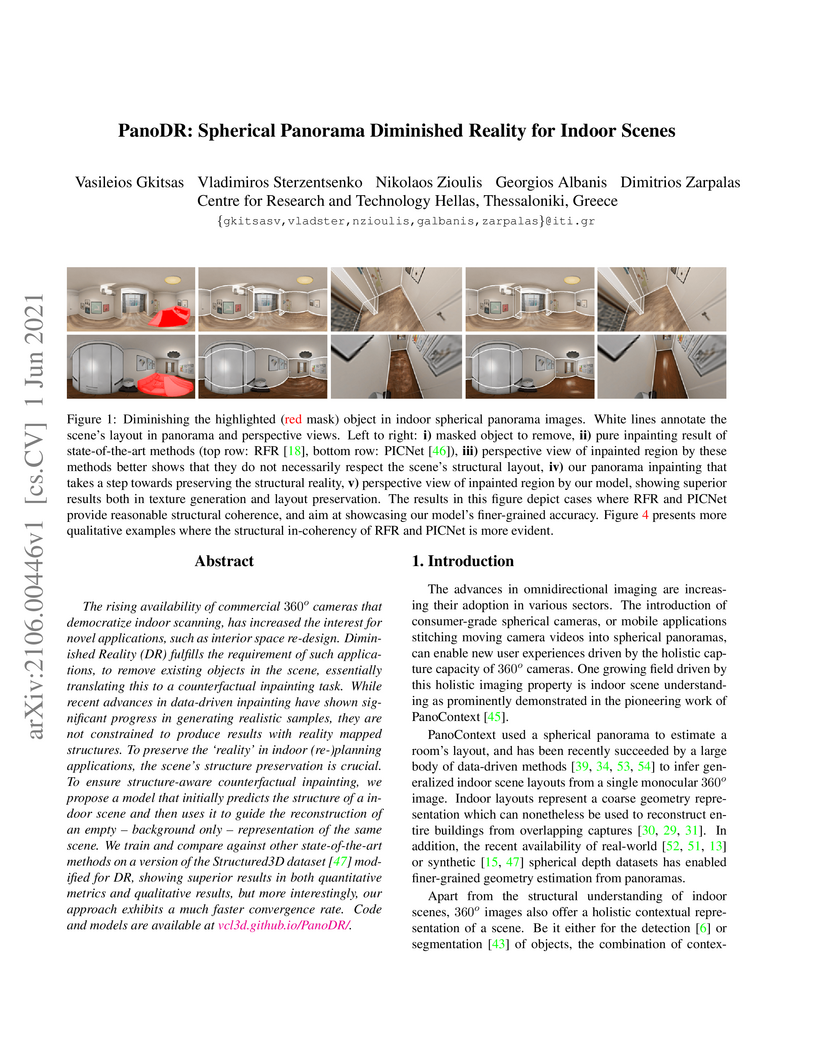
The rising availability of commercial cameras that democratize
indoor scanning, has increased the interest for novel applications, such as
interior space re-design. Diminished Reality (DR) fulfills the requirement of
such applications, to remove existing objects in the scene, essentially
translating this to a counterfactual inpainting task. While recent advances in
data-driven inpainting have shown significant progress in generating realistic
samples, they are not constrained to produce results with reality mapped
structures. To preserve the `reality' in indoor (re-)planning applications, the
scene's structure preservation is crucial. To ensure structure-aware
counterfactual inpainting, we propose a model that initially predicts the
structure of an indoor scene and then uses it to guide the reconstruction of an
empty -- background only -- representation of the same scene. We train and
compare against other state-of-the-art methods on a version of the Structured3D
dataset modified for DR, showing superior results in both quantitative metrics
and qualitative results, but more interestingly, our approach exhibits a much
faster convergence rate. Code and models are available at
this https URL .
17 Jan 2025
Data augmentation (DA) is ubiquitously used in training of Automatic Speech
Recognition (ASR) models. DA offers increased data variability, robustness and
generalization against different acoustic distortions. Recently,
personalization of ASR models on mobile devices has been shown to improve Word
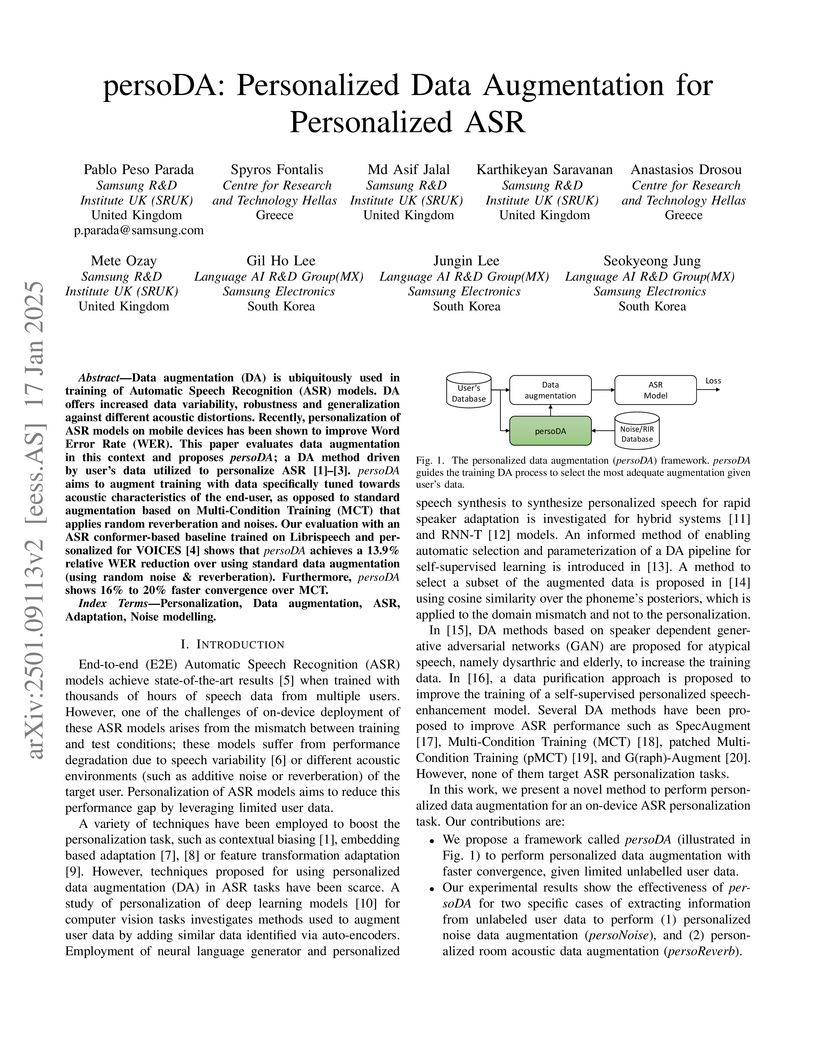
Error Rate (WER). This paper evaluates data augmentation in this context and
proposes persoDA; a DA method driven by user's data utilized to personalize
ASR. persoDA aims to augment training with data specifically tuned towards
acoustic characteristics of the end-user, as opposed to standard augmentation
based on Multi-Condition Training (MCT) that applies random reverberation and
noises. Our evaluation with an ASR conformer-based baseline trained on
Librispeech and personalized for VOICES shows that persoDA achieves a 13.9%
relative WER reduction over using standard data augmentation (using random
noise & reverberation). Furthermore, persoDA shows 16% to 20% faster
convergence over MCT.
17 Nov 2023
 Michigan State UniversityIdiap Research InstituteIIE, CASTU DarmstadtUniversity of BolognaSchool of Artificial Intelligence, UCASUniversity of CagliariHochschule DarmstadtFraunhofer IGDUniversidad Autonoma de MadridHarokopio University of AthensCentre for Research and Technology HellasMAIS, CASIAunico - idTechFederal Institute of Mato GrossoCAIR, HKISI, CASSchool of Cyber Security, UCASFederal University of ParańaUniversit´e de LausanneFacephiLENS, Inc.["École Polytechnique Fédérale de Lausanne"]
Michigan State UniversityIdiap Research InstituteIIE, CASTU DarmstadtUniversity of BolognaSchool of Artificial Intelligence, UCASUniversity of CagliariHochschule DarmstadtFraunhofer IGDUniversidad Autonoma de MadridHarokopio University of AthensCentre for Research and Technology HellasMAIS, CASIAunico - idTechFederal Institute of Mato GrossoCAIR, HKISI, CASSchool of Cyber Security, UCASFederal University of ParańaUniversit´e de LausanneFacephiLENS, Inc.["École Polytechnique Fédérale de Lausanne"]
The FRCSyn Challenge at WACV 2024 established an international benchmark to assess synthetic data's utility in face recognition. It demonstrated that synthetic data can mitigate demographic biases and, when combined with real data, consistently enhances overall FR system performance across challenging conditions.
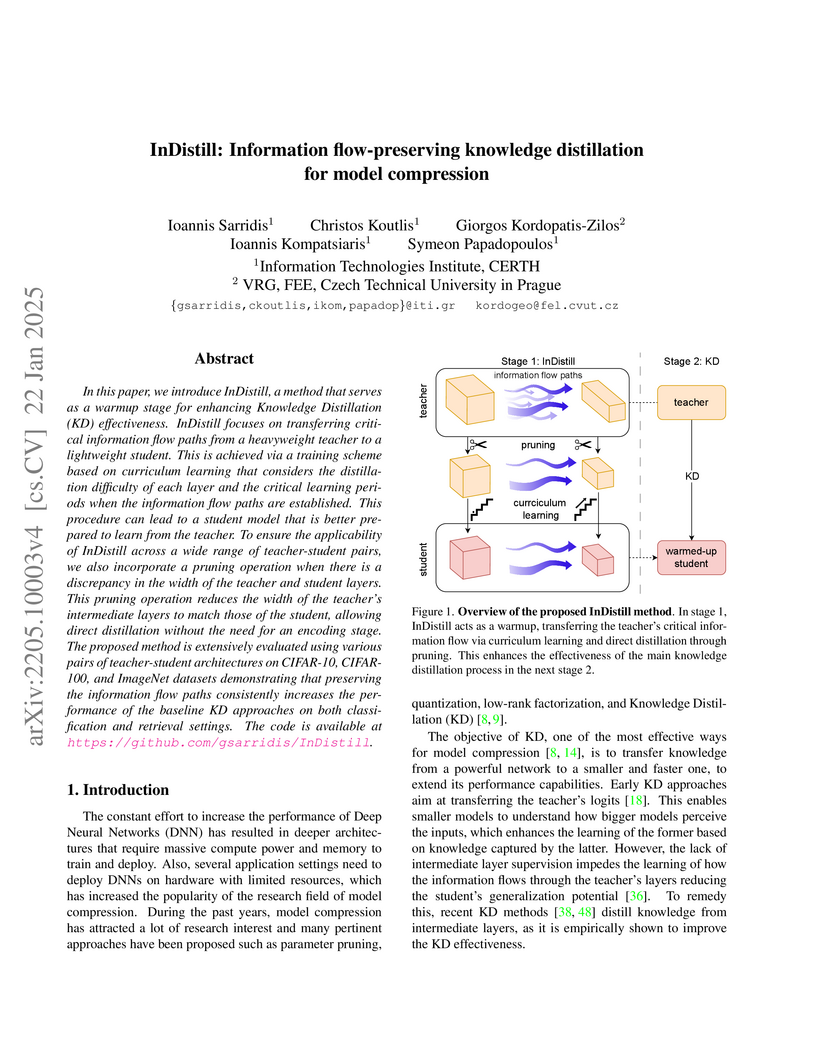
22 Jan 2025
In this paper, we introduce InDistill, a method that serves as a warmup stage for enhancing Knowledge Distillation (KD) effectiveness. InDistill focuses on transferring critical information flow paths from a heavyweight teacher to a lightweight student. This is achieved via a training scheme based on curriculum learning that considers the distillation difficulty of each layer and the critical learning periods when the information flow paths are established. This procedure can lead to a student model that is better prepared to learn from the teacher. To ensure the applicability of InDistill across a wide range of teacher-student pairs, we also incorporate a pruning operation when there is a discrepancy in the width of the teacher and student layers. This pruning operation reduces the width of the teacher's intermediate layers to match those of the student, allowing direct distillation without the need for an encoding stage. The proposed method is extensively evaluated using various pairs of teacher-student architectures on CIFAR-10, CIFAR-100, and ImageNet datasets demonstrating that preserving the information flow paths consistently increases the performance of the baseline KD approaches on both classification and retrieval settings. The code is available at this https URL.
18 Nov 2017
Nowadays, the construction of a complex robotic system requires a high level of specialization in a large number of diverse scientific areas. It is reasonable that a single researcher cannot create from scratch the entirety of this system, as it is impossible for him to have the necessary skills in the necessary fields. This obstacle is being surpassed with the existent robotic frameworks. This paper tries to give an extensive review of the most famous robotic frameworks and middleware, as well as to provide the means to effortlessly compare them. Additionally, we try to investigate the differences between the definitions of a robotic framework, a robotic middleware and a robotic architecture.
13 Jun 2025
The advent of accessible Generative AI tools enables anyone to create and
spread synthetic images on social media, often with the intention to mislead,
thus posing a significant threat to online information integrity. Most existing
Synthetic Image Detection (SID) solutions struggle on generated images sourced
from the Internet, as these are often altered by compression and other
operations. To address this, our research enhances SID by exploring data
augmentation combinations, leveraging a genetic algorithm for optimal
augmentation selection, and introducing a dual-criteria optimization approach.
These methods significantly improve model performance under real-world
perturbations. Our findings provide valuable insights for developing detection
models capable of identifying synthetic images across varying qualities and
transformations, with the best-performing model achieving a mean average
precision increase of +22.53% compared to models without augmentations. The
implementation is available at
github.com/efthimia145/sid-composite-data-augmentation.

02 Dec 2024
A systematic empirical comparison demonstrates that L2 regularization effectively mitigates Membership Inference Attacks by reducing model overfitting, often achieving privacy levels comparable to Differential Privacy while preserving higher model utility. The research reveals a strong correlation between overfitting and vulnerability to such attacks.

30 Nov 2024
Modern technologies have led illicit firearms trafficking to partially merge
with cybercrime, while simultaneously permitting its off-line aspects to become
more sophisticated. Law enforcement officers face difficult challenges that
require hi-tech solutions. This article presents a real-world system, powered
by advanced Artificial Intelligence, for facilitating them in their everyday
work.

08 Dec 2024
The Mixture Cure (MC) models constitute an appropriate and easily interpretable method when studying a time-to-event variable in a population comprised of both susceptible and cured individuals. In literature, those models usually assume that the latter are unobservable. However, there are cases in which a cured individual may be identified. For example, when studying the distant metastasis during the lifetime or the miscarriage during pregnancy, individuals that have died without a metastasis or have given birth are certainly non-susceptible. The same also holds when studying the x-year overall survival or the death during hospital stay. Common MC models ignore this information and consider them all censored, thus yielding in risk of assigning low immune probabilities to cured individuals. In this study, we consider a MC model that incorporates known information on cured individuals, with the time to cure identification being either deterministic or stochastic. We use the expectation-maximization algorithm to derive the maximum likelihood estimators. Furthermore, we compare different strategies that account for cure information such as (1) assigning infinite times to event for known cured cases and adjusting the traditional model and (2) considering only the probability of cure identification but ignoring the time until that happens. Theoretical results and simulations demonstrate the value of the proposed model especially when the time to cure identification is stochastic, increasing precision and decreasing the mean squared error. On the other hand, the traditional models that ignore the known cured information perform well when the curation is achieved after a known cutoff point. Moreover, through simulations the comparisons of the different strategies are examined, as possible alternatives to the complete-information model.
17 Sep 2019
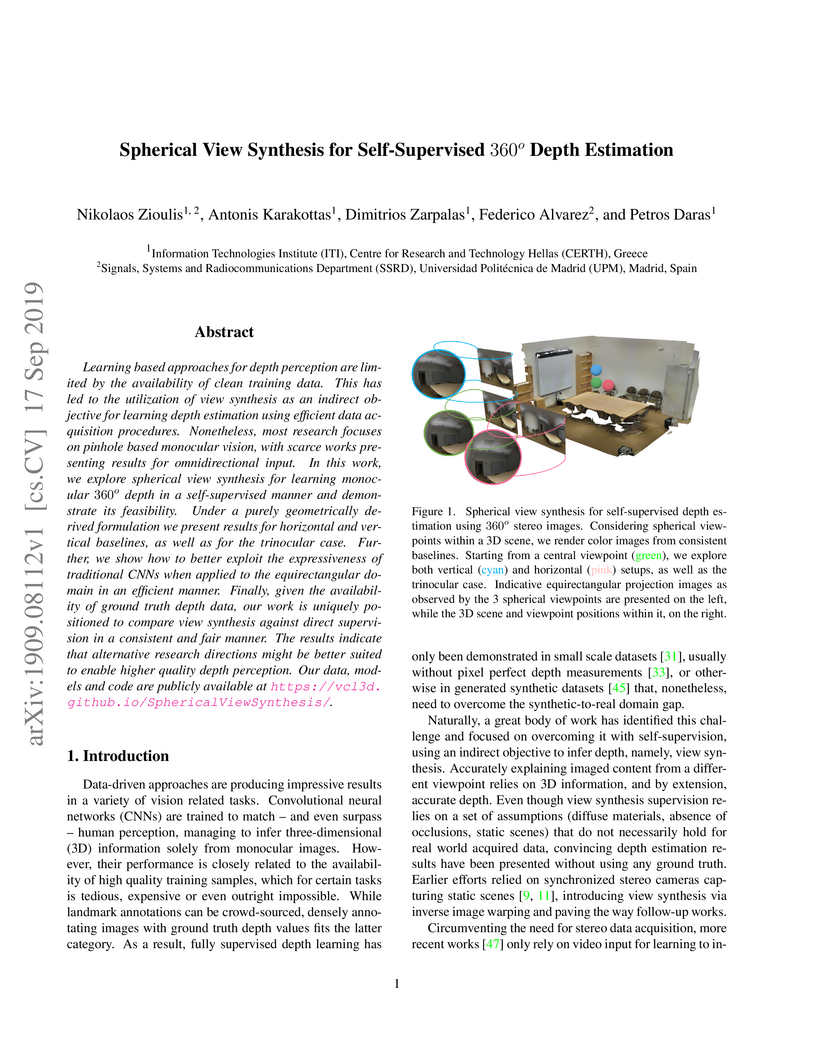
Learning based approaches for depth perception are limited by the
availability of clean training data. This has led to the utilization of view
synthesis as an indirect objective for learning depth estimation using
efficient data acquisition procedures. Nonetheless, most research focuses on
pinhole based monocular vision, with scarce works presenting results for
omnidirectional input. In this work, we explore spherical view synthesis for
learning monocular 360 depth in a self-supervised manner and demonstrate its
feasibility. Under a purely geometrically derived formulation we present
results for horizontal and vertical baselines, as well as for the trinocular
case. Further, we show how to better exploit the expressiveness of traditional
CNNs when applied to the equirectangular domain in an efficient manner.
Finally, given the availability of ground truth depth data, our work is
uniquely positioned to compare view synthesis against direct supervision in a
consistent and fair manner. The results indicate that alternative research
directions might be better suited to enable higher quality depth perception.
Our data, models and code are publicly available at
this https URL

16 Feb 2021
The knowledge of potentially druggable binding sites on proteins is an
important preliminary step towards the discovery of novel drugs. The
computational prediction of such areas can be boosted by following the recent
major advances in the deep learning field and by exploiting the increasing
availability of proper data. In this paper, a novel computational method for
the prediction of potential binding sites is proposed, called DeepSurf.
DeepSurf combines a surface-based representation, where a number of 3D
voxelized grids are placed on the protein's surface, with state-of-the-art deep
learning architectures. After being trained on the large database of scPDB,
DeepSurf demonstrates superior results on three diverse testing datasets, by
surpassing all its main deep learning-based competitors, while attaining
competitive performance to a set of traditional non-data-driven approaches.

10 Dec 2021
The task of transforming a furnished room image into a background-only is extremely challenging since it requires making large changes regarding the scene context while still preserving the overall layout and style. In order to acquire photo-realistic and structural consistent background, existing deep learning methods either employ image inpainting approaches or incorporate the learning of the scene layout as an individual task and leverage it later in a not fully differentiable semantic region-adaptive normalization module. To tackle these drawbacks, we treat scene layout generation as a feature linear transformation problem and propose a simple yet effective adjusted fully differentiable soft semantic region-adaptive normalization module (softSEAN) block. We showcase the applicability in diminished reality and depth estimation tasks, where our approach besides the advantages of mitigating training complexity and non-differentiability issues, surpasses the compared methods both quantitatively and qualitatively. Our softSEAN block can be used as a drop-in module for existing discriminative and generative models. Implementation is available on this http URL.

01 Dec 2021
In this work we contribute a distribution shift benchmark for a computer vision task; monocular depth estimation. Our differentiation is the decomposition of the wider distribution shift of uncontrolled testing on in-the-wild data, to three distinct distribution shifts. Specifically, we generate data via synthesis and analyze them to produce covariate (color input), prior (depth output) and concept (their relationship) distribution shifts. We also synthesize combinations and show how each one is indeed a different challenge to address, as stacking them produces increased performance drops and cannot be addressed horizontally using standard approaches.
03 Dec 2018
In this paper, a detailed study on crime classification and prediction using
deep learning architectures is presented. We examine the effectiveness of deep
learning algorithms on this domain and provide recommendations for designing
and training deep learning systems for predicting crime areas, using open data
from police reports. Having as training data time-series of crime types per
location, a comparative study of 10 state-of-the-art methods against 3
different deep learning configurations is conducted. In our experiments with
five publicly available datasets, we demonstrate that the deep learning-based
methods consistently outperform the existing best-performing methods. Moreover,
we evaluate the effectiveness of different parameters in the deep learning
architectures and give insights for configuring them in order to achieve
improved performance in crime classification and finally crime prediction.
02 Jul 2013

The growing popularity of smart mobile devices such as smartphones and tablets has made them an attractive target for cyber-criminals, resulting in a rapidly growing and evolving mobile threat as attackers experiment with new business models by targeting mobile users. With the emergence of the first large-scale mobile botnets, the core network has also become vulnerable to distributed denial-of-service attacks such as the signaling attack. Furthermore, complementary access methods such as Wi-Fi and femtocells introduce additional vulnerabilities for the mobile users as well as the core network. In this paper, we present the NEMESYS approach to smart mobile network security. The goal of the NEMESYS project is to develop novel security technologies for seamless service provisioning in the smart mobile ecosystem, and to improve mobile network security through a better understanding of the threat landscape. To this purpose, NEMESYS will collect and analyze information about the nature of cyber-attacks targeting smart mobile devices and the core network so that appropriate counter-measures can be taken. We are developing a data collection infrastructure that incorporates virtualized mobile honeypots and honeyclients in order to gather, detect and provide early warning of mobile attacks and understand the modus operandi of cyber-criminals that target mobile devices. By correlating the extracted information with known attack patterns from wireline networks, we plan to reveal and identify the possible shift in the way that cyber-criminals launch attacks against smart mobile devices.

25 Oct 2024
Bias in computer vision systems can perpetuate or even amplify discrimination
against certain populations. Considering that bias is often introduced by
biased visual datasets, many recent research efforts focus on training fair
models using such data. However, most of them heavily rely on the availability
of protected attribute labels in the dataset, which limits their applicability,
while label-unaware approaches, i.e., approaches operating without such labels,
exhibit considerably lower performance. To overcome these limitations, this
work introduces FLAC, a methodology that minimizes mutual information between
the features extracted by the model and a protected attribute, without the use
of attribute labels. To do that, FLAC proposes a sampling strategy that
highlights underrepresented samples in the dataset, and casts the problem of
learning fair representations as a probability matching problem that leverages
representations extracted by a bias-capturing classifier. It is theoretically
shown that FLAC can indeed lead to fair representations, that are independent
of the protected attributes. FLAC surpasses the current state-of-the-art on
Biased-MNIST, CelebA, and UTKFace, by 29.1%, 18.1%, and 21.9%, respectively.
Additionally, FLAC exhibits 2.2% increased accuracy on ImageNet-A and up to
4.2% increased accuracy on Corrupted-Cifar10. Finally, in most experiments,
FLAC even outperforms the bias label-aware state-of-the-art methods.
01 Aug 2023
 University of Illinois at Urbana-Champaign
University of Illinois at Urbana-Champaign University of Chicago
University of Chicago University of California, San Diego
University of California, San Diego Argonne National Laboratory
Argonne National Laboratory Brookhaven National Laboratory
Brookhaven National Laboratory Lawrence Berkeley National LaboratoryUniversity of HelsinkiThe University of Manchester
Lawrence Berkeley National LaboratoryUniversity of HelsinkiThe University of Manchester Duke University
Duke University University of VirginiaLund UniversityUniversity of California BerkeleyTechnical University MunichRutgers, The State University of New JerseyCentre for Research and Technology Hellas
University of VirginiaLund UniversityUniversity of California BerkeleyTechnical University MunichRutgers, The State University of New JerseyCentre for Research and Technology HellasA foundational set of findable, accessible, interoperable, and reusable
(FAIR) principles were proposed in 2016 as prerequisites for proper data
management and stewardship, with the goal of enabling the reusability of
scholarly data. The principles were also meant to apply to other digital
assets, at a high level, and over time, the FAIR guiding principles have been
re-interpreted or extended to include the software, tools, algorithms, and
workflows that produce data. FAIR principles are now being adapted in the
context of AI models and datasets. Here, we present the perspectives, vision,
and experiences of researchers from different countries, disciplines, and
backgrounds who are leading the definition and adoption of FAIR principles in
their communities of practice, and discuss outcomes that may result from
pursuing and incentivizing FAIR AI research. The material for this report
builds on the FAIR for AI Workshop held at Argonne National Laboratory on June
7, 2022.
19 Oct 2020
6D pose estimation is crucial for augmented reality, virtual reality, robotic
manipulation and visual navigation. However, the problem is challenging due to
the variety of objects in the real world. They have varying 3D shape and their
appearances in captured images are affected by sensor noise, changing lighting
conditions and occlusions between objects. Different pose estimation methods
have different strengths and weaknesses, depending on feature representations
and scene contents. At the same time, existing 3D datasets that are used for
data-driven methods to estimate 6D poses have limited view angles and low
resolution. To address these issues, we organize the Shape Retrieval Challenge
benchmark on 6D pose estimation and create a physically accurate simulator that
is able to generate photo-realistic color-and-depth image pairs with
corresponding ground truth 6D poses. From captured color and depth images, we
use this simulator to generate a 3D dataset which has 400 photo-realistic
synthesized color-and-depth image pairs with various view angles for training,
and another 100 captured and synthetic images for testing. Five research groups
register in this track and two of them submitted their results. Data-driven
methods are the current trend in 6D object pose estimation and our evaluation
results show that approaches which fully exploit the color and geometric
features are more robust for 6D pose estimation of reflective and texture-less
objects and occlusion. This benchmark and comparative evaluation results have
the potential to further enrich and boost the research of 6D object pose
estimation and its applications.
There are no more papers matching your filters at the moment.
