25 Oct 2022

The paper introduces TreeFARMS, a method that fully enumerates the Rashomon set for sparse decision trees on real-world datasets. This approach enables the discovery of all almost-optimal models, demonstrating that numerous structurally diverse trees can achieve similar predictive performance, and facilitates the exact computation of Model Class Reliance.

30 May 2022

A fundamental problem in drug discovery is to design molecules that bind to specific proteins. To tackle this problem using machine learning methods, here we propose a novel and effective framework, known as GraphBP, to generate 3D molecules that bind to given proteins by placing atoms of specific types and locations to the given binding site one by one. In particular, at each step, we first employ a 3D graph neural network to obtain geometry-aware and chemically informative representations from the intermediate contextual information. Such context includes the given binding site and atoms placed in the previous steps. Second, to preserve the desirable equivariance property, we select a local reference atom according to the designed auxiliary classifiers and then construct a local spherical coordinate system. Finally, to place a new atom, we generate its atom type and relative location w.r.t. the constructed local coordinate system via a flow model. We also consider generating the variables of interest sequentially to capture the underlying dependencies among them. Experiments demonstrate that our GraphBP is effective to generate 3D molecules with binding ability to target protein binding sites. Our implementation is available at this https URL.
31 Dec 2020
Selective forgetting or removing information from deep neural networks (DNNs)
is essential for continual learning and is challenging in controlling the DNNs.
Such forgetting is crucial also in a practical sense since the deployed DNNs
may be trained on the data with outliers, poisoned by attackers, or with
leaked/sensitive information. In this paper, we formulate selective forgetting
for classification tasks at a finer level than the samples' level. We specify
the finer level based on four datasets distinguished by two conditions: whether
they contain information to be forgotten and whether they are available for the
forgetting procedure. Additionally, we reveal the need for such formulation
with the datasets by showing concrete and practical situations. Moreover, we
introduce the forgetting procedure as an optimization problem on three
criteria; the forgetting, the correction, and the remembering term.
Experimental results show that the proposed methods can make the model forget
to use specific information for classification. Notably, in specific cases, our
methods improved the model's accuracy on the datasets, which contains
information to be forgotten but is unavailable in the forgetting procedure.
Such data are unexpectedly found and misclassified in actual situations.

06 Jan 2023
Finding a ground state of a given Hamiltonian of an Ising model on a graph
is an important but hard problem. The standard approach for this kind
of problem is the application of algorithms that rely on single-spin-flip
Markov chain Monte Carlo methods, such as the simulated annealing based on
Glauber or Metropolis dynamics. In this paper, we investigate a particular kind
of stochastic cellular automata, in which all spins are updated independently
and simultaneously. We prove that (i) if the temperature is fixed sufficiently
high, then the mixing time is at most of order , and that (ii) if the
temperature drops in time as , then the limiting measure is
uniformly distributed over the ground states. We also provide some simulations
of the algorithms studied in this paper implemented on a GPU and show their
superior performance compared to the conventional simulated annealing.

19 Feb 2024


Learning causal structures from observational data is a fundamental problem
facing important computational challenges when the number of variables is
large. In the context of linear structural equation models (SEMs), this paper
focuses on learning causal structures from the inverse covariance matrix. The
proposed method, called ICID for Independence-preserving Decomposition from
Inverse Covariance matrix, is based on continuous optimization of a matrix
decomposition model that preserves the nonzero patterns of the inverse
covariance matrix. Through theoretical and empirical evidences, we show that
ICID efficiently identifies the sought directed acyclic graph (DAG) assuming
the knowledge of noise variances. Moreover, ICID is shown empirically to be
robust under bounded misspecification of noise variances in the case where the
noise variances are non-equal. The proposed method enjoys a low complexity, as
reflected by its time efficiency in the experiments, and also enables a novel
regularization scheme that yields highly accurate solutions on the Simulated
fMRI data (Smith et al., 2011) in comparison with state-of-the-art algorithms.

29 Aug 2021

In this study, we report the successful execution of in-air knotting of rope
using a dual-arm two-finger robot based on deep learning. Owing to its
flexibility, the state of the rope was in constant flux during the operation of
the robot. This required the robot control system to dynamically correspond to
the state of the object at all times. However, a manual description of
appropriate robot motions corresponding to all object states is difficult to be
prepared in advance. To resolve this issue, we constructed a model that
instructed the robot to perform bowknots and overhand knots based on two deep
neural networks trained using the data gathered from its sensorimotor,
including visual and proximity sensors. The resultant model was verified to be
capable of predicting the appropriate robot motions based on the sensory
information available online. In addition, we designed certain task motions
based on the Ian knot method using the dual-arm two-fingers robot. The designed
knotting motions do not require a dedicated workbench or robot hand, thereby
enhancing the versatility of the proposed method. Finally, experiments were
performed to estimate the knotting performance of the real robot while
executing overhand knots and bowknots on rope and its success rate. The
experimental results established the effectiveness and high performance of the
proposed method.

19 Aug 2019
A New Fast Weighted All-pairs Shortest Path Search Algorithm Based on Pruning by Shortest Path Trees
A New Fast Weighted All-pairs Shortest Path Search Algorithm Based on Pruning by Shortest Path Trees
Recently we submitted a paper, whose title is A New Fast Unweighted All-pairs
Shortest Path Search Algorithm Based on Pruning by Shortest Path Trees, to
arXiv. This is related to unweighted graphs. This paper also presents a new
fast all-pairs shortest path algorithm for weighted graph based on the same
idea. In Dijkstra algorithm which is said to be fast in weighted graphs, the
average number of accesses to adjacent vertices (expressed by {\alpha}) is
about equal to the average degree of the graph. On the other hand, our
algorithm utilizes the shortest path trees of adjacent vertices of each source
vertex in the same manner as the algorithm for unweighted graphs, and reduce
{\alpha} drastically in comparison with Dijkstra algorithm. Roughly speaking
{\alpha} is reduced to the value close to 1, because the average degree of a
tree is about 2, and one is used to come in and the other is used to go out,
although that does not hold true when the depth of the short path trees is
small. In case of weighted graphs, a problem which does not occur in unweighted
graphs occurs. It is waiting for the generation of the shortest path tree of an
adjacent vertex. Therefore, it is possible that a deadlock occurs. We prove our
algorithm is deadlock-free. We compared our algorithm with Dijkstra and Peng
algorithms. On Dijkstra algorithm ours outperforms it on speed and {\alpha}
except that Dijkstra algorithm slightly outperforms ours or they are almost the
same on CPU time in sparse scale-free graphs. The result on Peng algorithm is
as follows: In speed and {\alpha}, ours outperforms Peng algorithm in
hypercube-shaped and dense scale-free graphs, but conversely Peng algorithm
outperforms ours in sparse scale-free graphs.

17 Jun 2019
The Bezier simplex fitting is a novel data modeling technique which exploits geometric structures of data to approximate the Pareto front of multi-objective optimization problems. There are two fitting methods based on different sampling strategies. The inductive skeleton fitting employs a stratified subsampling from each skeleton of a simplex, whereas the all-at-once fitting uses a non-stratified sampling which treats a simplex as a whole. In this paper, we analyze the asymptotic risks of those Bézier simplex fitting methods and derive the optimal subsample ratio for the inductive skeleton fitting. It is shown that the inductive skeleton fitting with the optimal ratio has a smaller risk when the degree of a Bezier simplex is less than three. Those results are verified numerically under small to moderate sample sizes. In addition, we provide two complementary applications of our theory: a generalized location problem and a multi-objective hyper-parameter tuning of the group lasso. The former can be represented by a Bezier simplex of degree two where the inductive skeleton fitting outperforms. The latter can be represented by a Bezier simplex of degree three where the all-at-once fitting gets an advantage.

13 Dec 2018


Multi-objective optimization problems require simultaneously optimizing two
or more objective functions. Many studies have reported that the solution set
of an M-objective optimization problem often forms an (M-1)-dimensional
topological simplex (a curved line for M=2, a curved triangle for M=3, a curved
tetrahedron for M=4, etc.). Since the dimensionality of the solution set
increases as the number of objectives grows, an exponentially large sample size
is needed to cover the solution set. To reduce the required sample size, this
paper proposes a Bezier simplex model and its fitting algorithm. These
techniques can exploit the simplex structure of the solution set and decompose
a high-dimensional surface fitting task into a sequence of low-dimensional
ones. An approximation theorem of Bezier simplices is proven. Numerical
experiments with synthetic and real-world optimization problems demonstrate
that the proposed method achieves an accurate approximation of high-dimensional
solution sets with small samples. In practice, such an approximation will be
conducted in the post-optimization process and enable a better trade-off
analysis.

14 Jul 2020

Japanese character figurines are popular and have pivot position in Otaku
culture. Although numerous robots have been developed, less have focused on
otaku-culture or on embodying the anime character figurine. Therefore, we take
the first steps to bridge this gap by developing Hatsuki, which is a humanoid
robot platform with anime based design. Hatsuki's novelty lies in aesthetic
design, 2D facial expressions, and anime-style behaviors that allows it to
deliver rich interaction experiences resembling anime-characters. We explain
our design implementation process of Hatsuki, followed by our evaluations. In
order to explore user impressions and opinions towards Hatsuki, we conducted a
questionnaire in the world's largest anime-figurine event. The results indicate
that participants were generally very satisfied with Hatsuki's design, and
proposed various use case scenarios and deployment contexts for Hatsuki. The
second evaluation focused on imitation learning, as such method can provide
better interaction ability in the real world and generate rich,
context-adaptive behavior in different situations. We made Hatsuki learn 11
actions, combining voice, facial expressions and motions, through neuron
network based policy model with our proposed interface. Results show our
approach was successfully able to generate the actions through self-organized
contexts, which shows the potential for generalizing our approach in further
actions under different contexts. Lastly, we present our future research
direction for Hatsuki, and provide our conclusion.

29 Mar 2019

There has been a strong demand for algorithms that can execute machine
learning as faster as possible and the speed of deep learning has accelerated
by 30 times only in the past two years. Distributed deep learning using the
large mini-batch is a key technology to address the demand and is a great
challenge as it is difficult to achieve high scalability on large clusters
without compromising accuracy. In this paper, we introduce optimization methods
which we applied to this challenge. We achieved the training time of 74.7
seconds using 2,048 GPUs on ABCI cluster applying these methods. The training
throughput is over 1.73 million images/sec and the top-1 validation accuracy is
75.08%.
18 Nov 2022
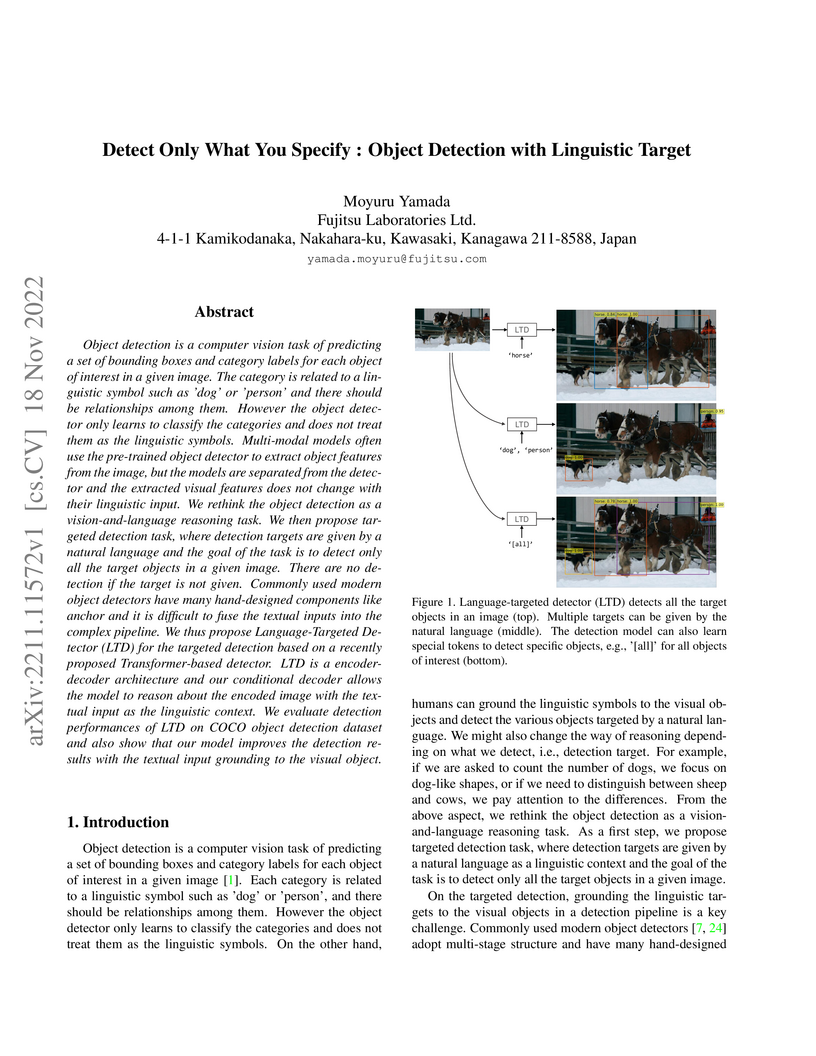
Object detection is a computer vision task of predicting a set of bounding boxes and category labels for each object of interest in a given image. The category is related to a linguistic symbol such as 'dog' or 'person' and there should be relationships among them. However the object detector only learns to classify the categories and does not treat them as the linguistic symbols. Multi-modal models often use the pre-trained object detector to extract object features from the image, but the models are separated from the detector and the extracted visual features does not change with their linguistic input. We rethink the object detection as a vision-and-language reasoning task. We then propose targeted detection task, where detection targets are given by a natural language and the goal of the task is to detect only all the target objects in a given image. There are no detection if the target is not given. Commonly used modern object detectors have many hand-designed components like anchor and it is difficult to fuse the textual inputs into the complex pipeline. We thus propose Language-Targeted Detector (LTD) for the targeted detection based on a recently proposed Transformer-based detector. LTD is a encoder-decoder architecture and our conditional decoder allows the model to reason about the encoded image with the textual input as the linguistic context. We evaluate detection performances of LTD on COCO object detection dataset and also show that our model improves the detection results with the textual input grounding to the visual object.
22 Feb 2023
Variational autoencoder (VAE) estimates the posterior parameters (mean and
variance) of latent variables corresponding to each input data. While it is
used for many tasks, the transparency of the model is still an underlying
issue. This paper provides a quantitative understanding of VAE property through
the differential geometric and information-theoretic interpretations of VAE.
According to the Rate-distortion theory, the optimal transform coding is
achieved by using an orthonormal transform with PCA basis where the transform
space is isometric to the input. Considering the analogy of transform coding to
VAE, we clarify theoretically and experimentally that VAE can be mapped to an
implicit isometric embedding with a scale factor derived from the posterior
parameter. As a result, we can estimate the data probabilities in the input
space from the prior, loss metrics, and corresponding posterior parameters, and
further, the quantitative importance of each latent variable can be evaluated
like the eigenvalue of PCA.

25 Aug 2020
Nowadays, systems containing components based on machine learning (ML)
methods are becoming more widespread. In order to ensure the intended behavior
of a software system, there are standards that define necessary quality aspects
of the system and its components (such as ISO/IEC 25010). Due to the different
nature of ML, we have to adjust quality aspects or add additional ones (such as
trustworthiness) and be very precise about which aspect is really relevant for
which object of interest (such as completeness of training data), and how to
objectively assess adherence to quality requirements. In this article, we
present the construction of a quality model (i.e., evaluation objects, quality
aspects, and metrics) for an ML system based on an industrial use case. This
quality model enables practitioners to specify and assess quality requirements
for such kinds of ML systems objectively. In the future, we want to learn how
the term quality differs between different types of ML systems and come up with
general guidelines for specifying and assessing qualities of ML systems.

21 Aug 2023

Domain shifts in the training data are common in practical applications of
machine learning; they occur for instance when the data is coming from
different sources. Ideally, a ML model should work well independently of these
shifts, for example, by learning a domain-invariant representation. However,
common ML losses do not give strong guarantees on how consistently the ML model
performs for different domains, in particular, whether the model performs well
on a domain at the expense of its performance on another domain. In this paper,
we build new theoretical foundations for this problem, by contributing a set of
mathematical relations between classical losses for supervised ML and the
Wasserstein distance in joint space (i.e. representation and output space). We
show that classification or regression losses, when combined with a GAN-type
discriminator between domains, form an upper-bound to the true Wasserstein
distance between domains. This implies a more invariant representation and also
more stable prediction performance across domains. Theoretical results are
corroborated empirically on several image datasets. Our proposed approach
systematically produces the highest minimum classification accuracy across
domains, and the most invariant representation.

01 Jun 2022
With Artificial intelligence (AI) to aid or automate decision-making advancing rapidly, a particular concern is its fairness. In order to create reliable, safe and trustworthy systems through human-centred artificial intelligence (HCAI) design, recent efforts have produced user interfaces (UIs) for AI experts to investigate the fairness of AI models. In this work, we provide a design space exploration that supports not only data scientists but also domain experts to investigate AI fairness. Using loan applications as an example, we held a series of workshops with loan officers and data scientists to elicit their requirements. We instantiated these requirements into FairHIL, a UI to support human-in-the-loop fairness investigations, and describe how this UI could be generalized to other use cases. We evaluated FairHIL through a think-aloud user study. Our work contributes better designs to investigate an AI model's fairness-and move closer towards responsible AI.

19 Aug 2019
We present a new fast all-pairs shortest path algorithm for unweighted
graphs. In breadth-first search which is said to representative and fast in
unweighted graphs, the average number of accesses to adjacent vertices
(expressed by {\alpha}) is about equal to the average degree of the graph. On
the other hand, our algorithm utilizes the shortest path trees of adjacent
vertices of each source vertex, and reduce {\alpha} drastically. Roughly
speaking {\alpha} is reduced to the value close to 1, because the average
degree of a tree is about 2, and one is used to come in and the other is used
to go out, although that does not hold true when the depth of the shortest path
trees is small. We compared our algorithm with breadth-first search algorithm,
and our results showed that ours outperforms breadth-first search on speed and
{\alpha}.

07 Aug 2020
This paper studies mean-risk portfolio optimization models using the conditional value-at-risk (CVaR) as a risk measure. We also employ a cardinality constraint for limiting the number of invested assets. Solving such a cardinality-constrained mean-CVaR model is computationally challenging for two main reasons. First, this model is formulated as a mixed-integer optimization (MIO) problem because of the cardinality constraint, so solving it exactly is very hard when the number of investable assets is large. Second, the problem size depends on the number of asset return scenarios, and the computational efficiency decreases when the number of scenarios is large. To overcome these challenges, we propose a high-performance algorithm named the \emph{bilevel cutting-plane algorithm} for exactly solving the cardinality-constrained mean-CVaR portfolio optimization problem. We begin by reformulating the problem as a bilevel optimization problem and then develop a cutting-plane algorithm for solving the upper-level problem. To speed up computations for cut generation, we apply to the lower-level problem another cutting-plane algorithm for efficiently minimizing CVaR with a large number of scenarios. Moreover, we prove the convergence properties of our bilevel cutting-plane algorithm. Numerical experiments demonstrate that, compared with other MIO approaches, our algorithm can provide optimal solutions to large problem instances faster.
30 Nov 2023
In many practical control applications, the performance level of a
closed-loop system degrades over time due to the change of plant
characteristics. Thus, there is a strong need for redesigning a controller
without going through the system modeling process, which is often difficult for
closed-loop systems. Reinforcement learning (RL) is one of the promising
approaches that enable model-free redesign of optimal controllers for nonlinear
dynamical systems based only on the measurement of the closed-loop system.
However, the learning process of RL usually requires a considerable number of
trial-and-error experiments using the poorly controlled system that may
accumulate wear on the plant. To overcome this limitation, we propose a
model-free two-step design approach that improves the transient learning
performance of RL in an optimal regulator redesign problem for unknown
nonlinear systems. Specifically, we first design a linear control law that
attains some degree of control performance in a model-free manner, and then,
train the nonlinear optimal control law with online RL by using the designed
linear control law in parallel. We introduce an offline RL algorithm for the
design of the linear control law and theoretically guarantee its convergence to
the LQR controller under mild assumptions. Numerical simulations show that the
proposed approach improves the transient learning performance and efficiency in
hyperparameter tuning of RL.

10 Dec 2019
Blockchain is one of the most popular distributed ledger technologies. It can solve the trust issue among enterprises. Hyperledger Fabric is a permissioned blockchain aiming at enterprise-grade business applications. However, compared to traditional distributed database solutions, one issue of blockchain based application development is the limited data access. For Fabric, the ledger data can only be retrieved by limited interfaces provided by Fabric SDKs or chaincode. In order to meet the requirements of data query and provide flexible query functions for real applications built on Fabric, this paper proposed a ledger data query platform called Ledgerdata Refiner. With ledger data analysis middleware, we provide sufficient interfaces for users to retrieve block or transaction efficiently. It is also able to track historical operations for any specific state. In addition, schemas of ledger state have been analyzed and clustered, which enable users to perform rich queries against ledger data. Finally, we validate the effectiveness of our query platform on a real application.
There are no more papers matching your filters at the moment.
