
13 Oct 2025
A framework called KnowRL enhances large language models' (LLMs) self-knowledge by enabling them to accurately identify the boundaries of their own capabilities and information. This approach improves intrinsic self-knowledge accuracy by 23-28% and boosts F1 scores on an external benchmark by 10-12% using a self-supervised reinforcement learning method.
18 Apr 2025
 ETH Zurich
ETH Zurich Google DeepMind
Google DeepMind University of Illinois at Urbana-Champaign
University of Illinois at Urbana-Champaign Google
Google Meta
Meta Cohere
Cohere University of California, San Diego
University of California, San Diego NVIDIASony AI
NVIDIASony AI Argonne National LaboratoryUCSBMBZUAI
Argonne National LaboratoryUCSBMBZUAI Lawrence Berkeley National Laboratory
Lawrence Berkeley National Laboratory King’s College LondonTU DarmstadtUMass AmherstEuropean CommissionIntelTU EindhovenUC IrvineUSYDPolytechnique MontrealTangenticNASAContextual AITattle Civic TechAccentureSaferAILibrAIArupCerebras SystemsRANDUL Research InstitutesQualcomm TechnologiesNutanixuheal.aiEthrivaDotphotonPRISM EvalMLCommonsVeraitechDuke Univ.NASA-ImpactStanford Univ.Univ. of ZurichRochester Inst. of Tech.CommonGroundDigitalResilientSurescriptsUniv. of BirminghamNational Univ PhilippinesARTIFEX LabsIowa State Univ.AI Equity AdvisoryTop Health TechBocconi Univ.Reins AIUniv. of SydneyTuraco StrategyThinkEvolveClarkson Univ.Univ. of TrentoNormalyzeNICMakerere Univ.AnoteARuss Data and Editing ServicesHarvard Univ.OWASPUniv. of Alabama, HuntsvilleIllinois Inst. of Tech.Univ. of OxfordUniv. of BathIAEAIUniv. of UtahRoyal Holloway Univ. of LondonUniversit
degli Studi di SalernoCoactive.AI
King’s College LondonTU DarmstadtUMass AmherstEuropean CommissionIntelTU EindhovenUC IrvineUSYDPolytechnique MontrealTangenticNASAContextual AITattle Civic TechAccentureSaferAILibrAIArupCerebras SystemsRANDUL Research InstitutesQualcomm TechnologiesNutanixuheal.aiEthrivaDotphotonPRISM EvalMLCommonsVeraitechDuke Univ.NASA-ImpactStanford Univ.Univ. of ZurichRochester Inst. of Tech.CommonGroundDigitalResilientSurescriptsUniv. of BirminghamNational Univ PhilippinesARTIFEX LabsIowa State Univ.AI Equity AdvisoryTop Health TechBocconi Univ.Reins AIUniv. of SydneyTuraco StrategyThinkEvolveClarkson Univ.Univ. of TrentoNormalyzeNICMakerere Univ.AnoteARuss Data and Editing ServicesHarvard Univ.OWASPUniv. of Alabama, HuntsvilleIllinois Inst. of Tech.Univ. of OxfordUniv. of BathIAEAIUniv. of UtahRoyal Holloway Univ. of LondonUniversit
degli Studi di SalernoCoactive.AI
The rapid advancement and deployment of AI systems have created an urgent
need for standard safety-evaluation frameworks. This paper introduces
AILuminate v1.0, the first comprehensive industry-standard benchmark for
assessing AI-product risk and reliability. Its development employed an open
process that included participants from multiple fields. The benchmark
evaluates an AI system's resistance to prompts designed to elicit dangerous,
illegal, or undesirable behavior in 12 hazard categories, including violent
crimes, nonviolent crimes, sex-related crimes, child sexual exploitation,
indiscriminate weapons, suicide and self-harm, intellectual property, privacy,
defamation, hate, sexual content, and specialized advice (election, financial,
health, legal). Our method incorporates a complete assessment standard,
extensive prompt datasets, a novel evaluation framework, a grading and
reporting system, and the technical as well as organizational infrastructure
for long-term support and evolution. In particular, the benchmark employs an
understandable five-tier grading scale (Poor to Excellent) and incorporates an
innovative entropy-based system-response evaluation.
In addition to unveiling the benchmark, this report also identifies
limitations of our method and of building safety benchmarks generally,
including evaluator uncertainty and the constraints of single-turn
interactions. This work represents a crucial step toward establishing global
standards for AI risk and reliability evaluation while acknowledging the need
for continued development in areas such as multiturn interactions, multimodal
understanding, coverage of additional languages, and emerging hazard
categories. Our findings provide valuable insights for model developers, system
integrators, and policymakers working to promote safer AI deployment.
20 Nov 2025
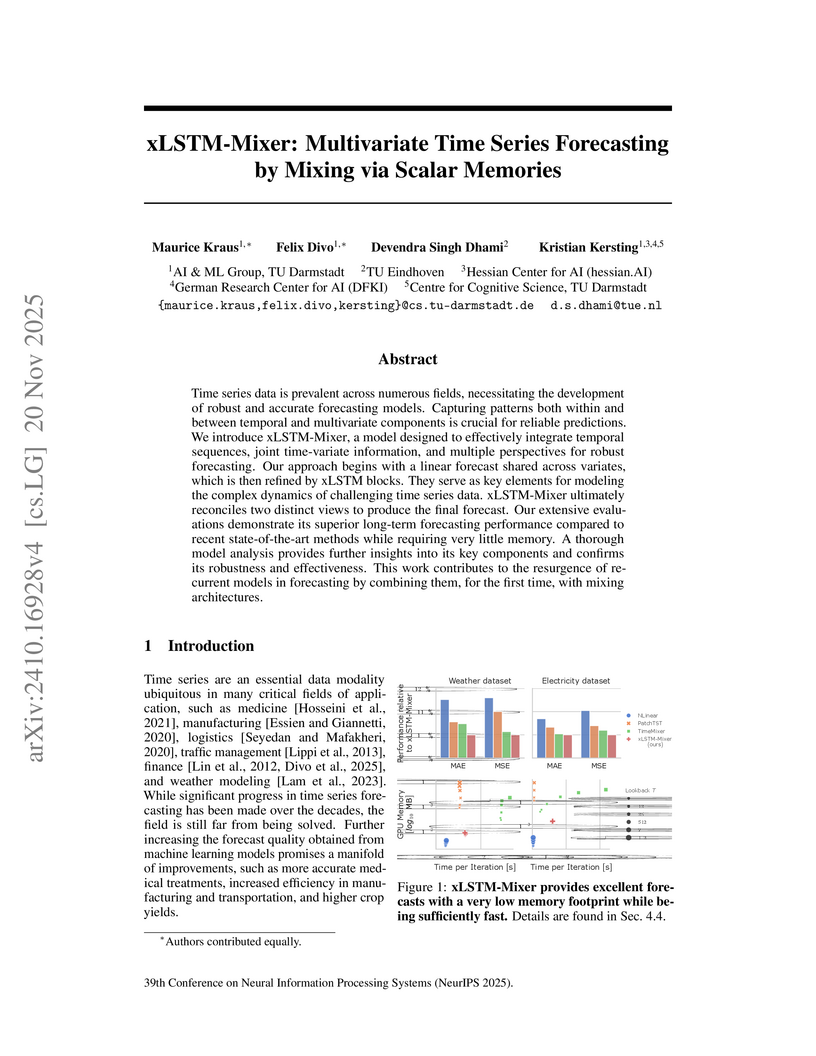
Time series data is prevalent across numerous fields, necessitating the development of robust and accurate forecasting models. Capturing patterns both within and between temporal and multivariate components is crucial for reliable predictions. We introduce xLSTM-Mixer, a model designed to effectively integrate temporal sequences, joint time-variate information, and multiple perspectives for robust forecasting. Our approach begins with a linear forecast shared across variates, which is then refined by xLSTM blocks. They serve as key elements for modeling the complex dynamics of challenging time series data. xLSTM-Mixer ultimately reconciles two distinct views to produce the final forecast. Our extensive evaluations demonstrate its superior long-term forecasting performance compared to recent state-of-the-art methods while requiring very little memory. A thorough model analysis provides further insights into its key components and confirms its robustness and effectiveness. This work contributes to the resurgence of recurrent models in forecasting by combining them, for the first time, with mixing architectures.
13 May 2024
 California Institute of Technology
California Institute of Technology Carnegie Mellon UniversityGoogle
Carnegie Mellon UniversityGoogle New York University
New York University University of Chicago
University of Chicago National University of Singapore
National University of Singapore University of Oxford
University of Oxford Stanford UniversityMetaCohereIllinois Institute of TechnologyGoogle ResearchNVIDIASony AI
Stanford UniversityMetaCohereIllinois Institute of TechnologyGoogle ResearchNVIDIASony AI MicrosoftUCSBIntel LabsDFKIUMass Amherst
MicrosoftUCSBIntel LabsDFKIUMass Amherst Virginia Tech
Virginia Tech MIT
MIT The Ohio State UniversityIowa State UniversityUniversity of TrentoUniversity of BathTU EindhovenBocconi UniversityUniversity of YorkIntel CorporationIIT Delhi
The Ohio State UniversityIowa State UniversityUniversity of TrentoUniversity of BathTU EindhovenBocconi UniversityUniversity of YorkIntel CorporationIIT Delhi AdobePolytechnique MontrealQualcomm Technologies, Inc.Hessian.AINIKENebius AIAI Risk and Vulnerability AllianceSaferAIHaize LabsJuniper NetworksCerebras SystemsMeedanRANDFAIRNutanixEthrivaDotphotonPatronus AINational University, PhilippinesMLCommonsGraphcoreCenter for Security and Emerging TechnologyCredo AIReins AIBestech SystemsContext FundActiveFenceDigital Safety Research InstituteLF AI & DataPublic Authority for Applied Education and Training of KuwaitCoactive.AI
AdobePolytechnique MontrealQualcomm Technologies, Inc.Hessian.AINIKENebius AIAI Risk and Vulnerability AllianceSaferAIHaize LabsJuniper NetworksCerebras SystemsMeedanRANDFAIRNutanixEthrivaDotphotonPatronus AINational University, PhilippinesMLCommonsGraphcoreCenter for Security and Emerging TechnologyCredo AIReins AIBestech SystemsContext FundActiveFenceDigital Safety Research InstituteLF AI & DataPublic Authority for Applied Education and Training of KuwaitCoactive.AIThis paper introduces v0.5 of the AI Safety Benchmark, which has been created by the MLCommons AI Safety Working Group. The AI Safety Benchmark has been designed to assess the safety risks of AI systems that use chat-tuned language models. We introduce a principled approach to specifying and constructing the benchmark, which for v0.5 covers only a single use case (an adult chatting to a general-purpose assistant in English), and a limited set of personas (i.e., typical users, malicious users, and vulnerable users). We created a new taxonomy of 13 hazard categories, of which 7 have tests in the v0.5 benchmark. We plan to release version 1.0 of the AI Safety Benchmark by the end of 2024. The v1.0 benchmark will provide meaningful insights into the safety of AI systems. However, the v0.5 benchmark should not be used to assess the safety of AI systems. We have sought to fully document the limitations, flaws, and challenges of v0.5. This release of v0.5 of the AI Safety Benchmark includes (1) a principled approach to specifying and constructing the benchmark, which comprises use cases, types of systems under test (SUTs), language and context, personas, tests, and test items; (2) a taxonomy of 13 hazard categories with definitions and subcategories; (3) tests for seven of the hazard categories, each comprising a unique set of test items, i.e., prompts. There are 43,090 test items in total, which we created with templates; (4) a grading system for AI systems against the benchmark; (5) an openly available platform, and downloadable tool, called ModelBench that can be used to evaluate the safety of AI systems on the benchmark; (6) an example evaluation report which benchmarks the performance of over a dozen openly available chat-tuned language models; (7) a test specification for the benchmark.

12 Jul 2025
Recently, newly developed Vision-Language Models (VLMs), such as OpenAI's o1, have emerged, seemingly demonstrating advanced reasoning capabilities across text and image modalities. However, the depth of these advances in language-guided perception and abstract reasoning remains underexplored, and it is unclear whether these models can truly live up to their ambitious promises. To assess the progress and identify shortcomings, we enter the wonderland of Bongard problems, a set of classic visual reasoning puzzles that require human-like abilities of pattern recognition and abstract reasoning. With our extensive evaluation setup, we show that while VLMs occasionally succeed in identifying discriminative concepts and solving some of the problems, they frequently falter. Surprisingly, even elementary concepts that may seem trivial to humans, such as simple spirals, pose significant challenges. Moreover, when explicitly asked to recognize ground truth concepts, they continue to falter, suggesting not only a lack of understanding of these elementary visual concepts but also an inability to generalize to unseen concepts. We compare the results of VLMs to human performance and observe that a significant gap remains between human visual reasoning capabilities and machine cognition.

13 Oct 2023




DataPerf introduces an open-source benchmark suite designed to reorient machine learning research by fostering innovation in data-centric AI. This suite, managed by MLCommons, provides a standardized platform for evaluating data curation, selection, cleaning, and acquisition techniques, with initial baselines across diverse tasks demonstrating considerable scope for improvement in data quality.

12 Nov 2025

The SPARC algorithm from Sony AI streamlines out-of-distribution generalization in contextual reinforcement learning by unifying context encoding and history-based adaptation into a single training phase. This approach demonstrated superior performance in Gran Turismo 7, successfully racing 100 unseen vehicles and adapting to new game physics, while also generalizing effectively in MuJoCo environments.

03 Sep 2024
Physics Informed Neural Networks (PINNs) offer several advantages when compared to traditional numerical methods for solving PDEs, such as being a mesh-free approach and being easily extendable to solving inverse problems. One promising approach for allowing PINNs to scale to multi-scale problems is to combine them with domain decomposition; for example, finite basis physics-informed neural networks (FBPINNs) replace the global PINN network with many localised networks which are summed together to approximate the solution. In this work, we significantly accelerate the training of FBPINNs by linearising their underlying optimisation problem. We achieve this by employing extreme learning machines (ELMs) as their subdomain networks and showing that this turns the FBPINN optimisation problem into one of solving a linear system or least-squares problem. We test our workflow in a preliminary fashion by using it to solve an illustrative 1D problem.
05 Dec 2024
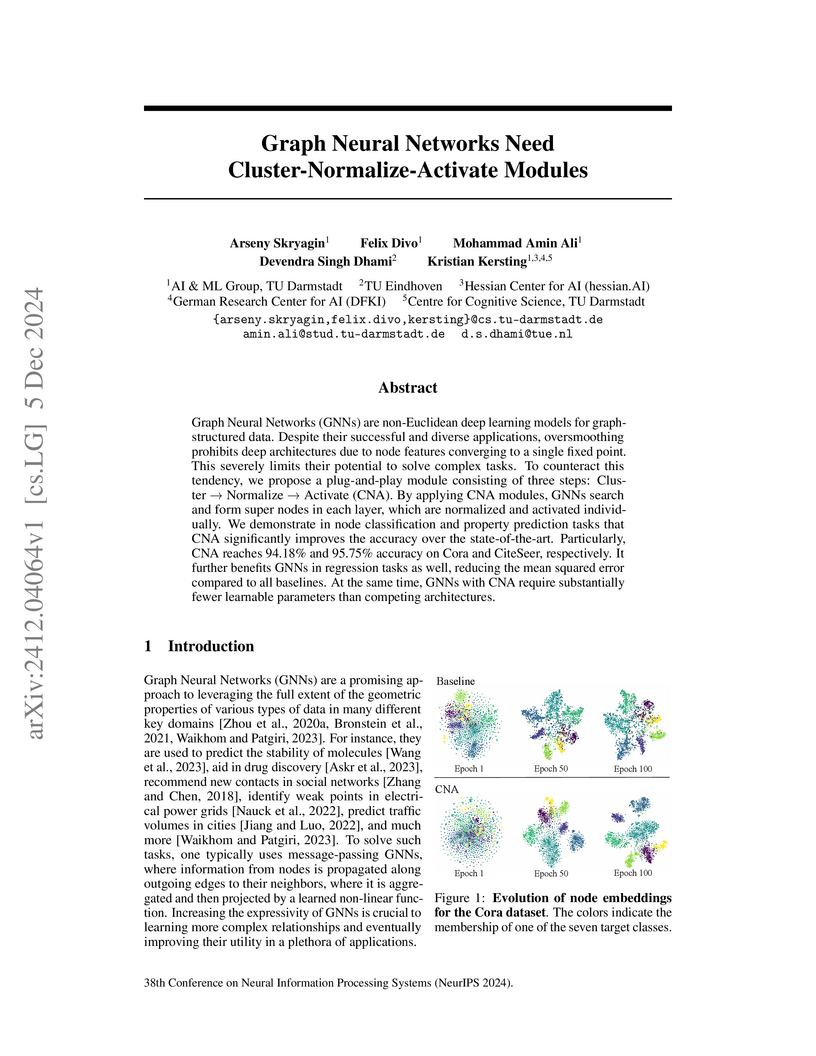
Skryagin et al. (2024) developed Cluster-Normalize-Activate (CNA) modules, which enable Graph Neural Networks (GNNs) to overcome the oversmoothing problem and function effectively at significantly greater depths. This approach yielded state-of-the-art performance on 8 out of 11 diverse node classification datasets and demonstrated improved accuracy and parameter efficiency across various graph tasks.

21 Apr 2025

Humans can leverage both symbolic reasoning and intuitive reactions. In
contrast, reinforcement learning policies are typically encoded in either
opaque systems like neural networks or symbolic systems that rely on predefined
symbols and rules. This disjointed approach severely limits the agents'
capabilities, as they often lack either the flexible low-level reaction
characteristic of neural agents or the interpretable reasoning of symbolic
agents. To overcome this challenge, we introduce BlendRL, a neuro-symbolic RL
framework that harmoniously integrates both paradigms within RL agents that use
mixtures of both logic and neural policies. We empirically demonstrate that
BlendRL agents outperform both neural and symbolic baselines in standard Atari
environments, and showcase their robustness to environmental changes.
Additionally, we analyze the interaction between neural and symbolic policies,
illustrating how their hybrid use helps agents overcome each other's
limitations.

20 Apr 2023
Researchers from TU Eindhoven, Philips Research, Simula Research Laboratory, and the University of Oslo developed SEIDR, an iterative framework that leverages large language models for fully autonomous program generation and repair. The system solves 19 out of 25 problems on the PSB2 benchmark in Python, surpassing traditional genetic programming, while reducing computational cost by achieving solutions with under 1000 program executions.

20 Feb 2025
Class-incremental learning requires models to continually acquire knowledge
of new classes without forgetting old ones. Although pre-trained models have
demonstrated strong performance in class-incremental learning, they remain
susceptible to catastrophic forgetting when learning new concepts. Excessive
plasticity in the models breaks generalizability and causes forgetting, while
strong stability results in insufficient adaptation to new classes. This
necessitates effective adaptation with minimal modifications to preserve the
general knowledge of pre-trained models. To address this challenge, we first
introduce a new parameter-efficient fine-tuning module 'Learn and Calibrate',
or LuCA, designed to acquire knowledge through an adapter-calibrator couple,
enabling effective adaptation with well-refined feature representations.
Second, for each learning session, we deploy a sparse LuCA module on top of the
last token just before the classifier, which we refer to as 'Token-level Sparse
Calibration and Adaptation', or TOSCA. This strategic design improves the
orthogonality between the modules and significantly reduces both training and
inference complexity. By leaving the generalization capabilities of the
pre-trained models intact and adapting exclusively via the last token, our
approach achieves a harmonious balance between stability and plasticity.
Extensive experiments demonstrate TOSCA's state-of-the-art performance while
introducing ~8 times fewer parameters compared to prior methods.

26 Dec 2023

Submodular maximization under matroid and cardinality constraints are classical problems with a wide range of applications in machine learning, auction theory, and combinatorial optimization. In this paper, we consider these problems in the dynamic setting, where (1) we have oracle access to a monotone submodular function and (2) we are given a sequence of insertions and deletions of elements of an underlying ground set .
We develop the first fully dynamic -approximation algorithm for the submodular maximization problem under the matroid constraint using an expected worst-case query complexity where 0 < \epsilon \le 1. This resolves an open problem of Chen and Peng (STOC'22) and Lattanzi et al. (NeurIPS'20).
As a byproduct, for the submodular maximization under the cardinality constraint , we propose a parameterized (by the cardinality constraint ) dynamic algorithm that maintains a -approximate solution of the sequence at any time using an expected worst-case query complexity . This is the first dynamic algorithm for the problem that has a query complexity independent of the size of ground set .

15 Dec 2014
We study sentiment analysis beyond the typical granularity of polarity and instead use Plutchik's wheel of emotions model. We introduce RBEM-Emo as an extension to the Rule-Based Emission Model algorithm to deduce such emotions from human-written messages. We evaluate our approach on two different datasets and compare its performance with the current state-of-the-art techniques for emotion detection, including a recursive auto-encoder. The results of the experimental study suggest that RBEM-Emo is a promising approach advancing the current state-of-the-art in emotion detection.

03 Jun 2025
This research systematically evaluates 24 diverse forecasting models for company fundamentals, comparing classical statistical and modern deep learning approaches on real-world financial data. It demonstrates that automated forecasts can achieve accuracy comparable to human analysts and, when integrated into factor investment strategies, can yield competitive returns over market benchmarks.

01 Jun 2016
At CRYPTO 2013, Boneh and Zhandry initiated the study of quantum-secure encryption. They proposed first indistinguishability definitions for the quantum world where the actual indistinguishability only holds for classical messages, and they provide arguments why it might be hard to achieve a stronger notion. In this work, we show that stronger notions are achievable, where the indistinguishability holds for quantum superpositions of messages. We investigate exhaustively the possibilities and subtle differences in defining such a quantum indistinguishability notion for symmetric-key encryption schemes. We justify our stronger definition by showing its equivalence to novel quantum semantic-security notions that we introduce. Furthermore, we show that our new security definitions cannot be achieved by a large class of ciphers -- those which are quasi-preserving the message length. On the other hand, we provide a secure construction based on quantum-resistant pseudorandom permutations; this construction can be used as a generic transformation for turning a large class of encryption schemes into quantum indistinguishable and hence quantum semantically secure ones. Moreover, our construction is the first completely classical encryption scheme shown to be secure against an even stronger notion of indistinguishability, which was previously known to be achievable only by using quantum messages and arbitrary quantum encryption circuits.

09 Apr 2025
Structuring ambiguity sets in Wasserstein-based distributionally robust
optimization (DRO) can improve their statistical properties when the
uncertainty consists of multiple independent components. The aim of this paper
is to solve stochastic optimization problems with unknown uncertainty when we
only have access to a finite set of samples from it. Exploiting strong duality
of DRO problems over structured ambiguity sets, we derive tractable
reformulations for certain classes of DRO and uncertainty quantification
problems. We also derive tractable reformulations for distributionally robust
chance-constrained problems. As the complexity of the reformulations may grow
exponentially with the number of independent uncertainty components, we employ
clustering strategies to obtain informative estimators, which yield problems of
manageable complexity. We demonstrate the effectiveness of the theoretical
results in a numerical simulation example.
01 Dec 2020

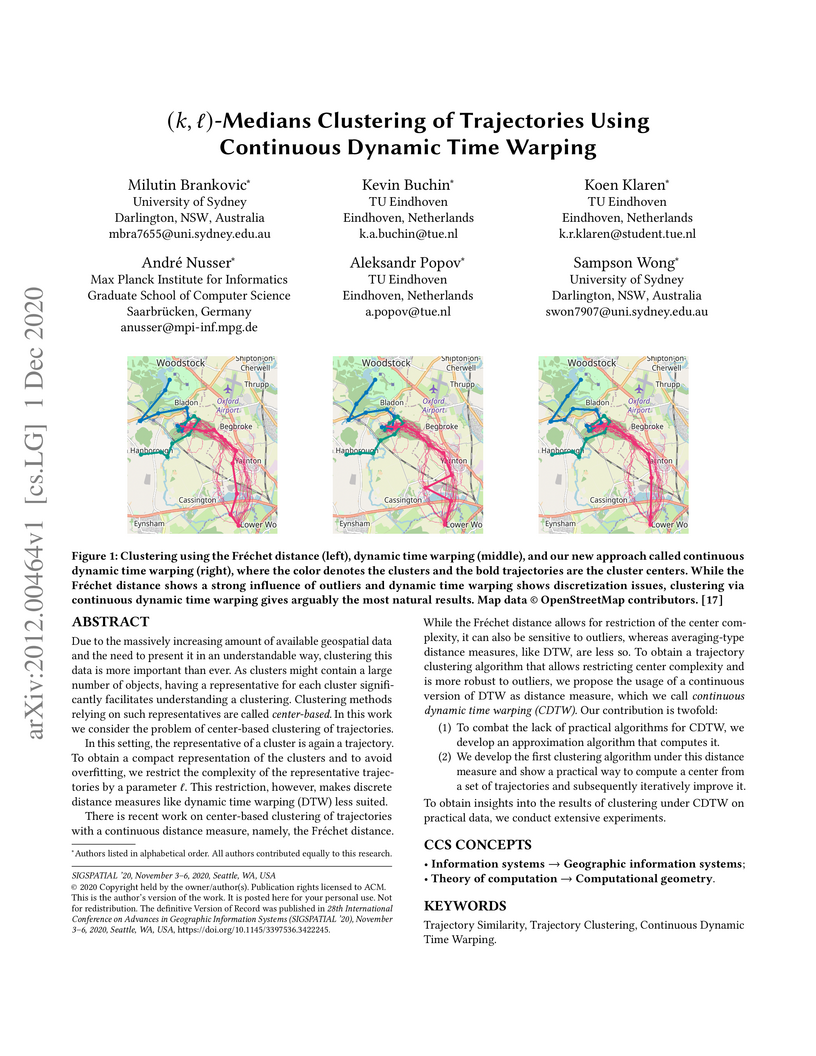
Due to the massively increasing amount of available geospatial data and the need to present it in an understandable way, clustering this data is more important than ever. As clusters might contain a large number of objects, having a representative for each cluster significantly facilitates understanding a clustering. Clustering methods relying on such representatives are called center-based. In this work we consider the problem of center-based clustering of trajectories.
In this setting, the representative of a cluster is again a trajectory. To obtain a compact representation of the clusters and to avoid overfitting, we restrict the complexity of the representative trajectories by a parameter l. This restriction, however, makes discrete distance measures like dynamic time warping (DTW) less suited.
There is recent work on center-based clustering of trajectories with a continuous distance measure, namely, the Fréchet distance. While the Fréchet distance allows for restriction of the center complexity, it can also be sensitive to outliers, whereas averaging-type distance measures, like DTW, are less so. To obtain a trajectory clustering algorithm that allows restricting center complexity and is more robust to outliers, we propose the usage of a continuous version of DTW as distance measure, which we call continuous dynamic time warping (CDTW). Our contribution is twofold:
1. To combat the lack of practical algorithms for CDTW, we develop an approximation algorithm that computes it.
2. We develop the first clustering algorithm under this distance measure and show a practical way to compute a center from a set of trajectories and subsequently iteratively improve it.
To obtain insights into the results of clustering under CDTW on practical data, we conduct extensive experiments.

18 Dec 2023
A primary challenge of physics-informed machine learning (PIML) is its generalization beyond the training domain, especially when dealing with complex physical problems represented by partial differential equations (PDEs). This paper aims to enhance the generalization capabilities of PIML, facilitating practical, real-world applications where accurate predictions in unexplored regions are crucial. We leverage the inherent causality and temporal sequential characteristics of PDE solutions to fuse PIML models with recurrent neural architectures based on systems of ordinary differential equations, referred to as neural oscillators. Through effectively capturing long-time dependencies and mitigating the exploding and vanishing gradient problem, neural oscillators foster improved generalization in PIML tasks. Extensive experimentation involving time-dependent nonlinear PDEs and biharmonic beam equations demonstrates the efficacy of the proposed approach. Incorporating neural oscillators outperforms existing state-of-the-art methods on benchmark problems across various metrics. Consequently, the proposed method improves the generalization capabilities of PIML, providing accurate solutions for extrapolation and prediction beyond the training data.
20 Aug 2025
Artificial intelligence (AI) is a digital technology that will be of major importance for the development of humanity in the near future. AI has raised fundamental questions about what we should do with such systems, what the systems themselves should do, what risks they involve and how we can control these. - After the background to the field (1), this article introduces the main debates (2), first on ethical issues that arise with AI systems as objects, i.e. tools made and used by humans; here, the main sections are privacy (2.1), manipulation (2.2), opacity (2.3), bias (2.4), autonomy & responsibility (2.6) and the singularity (2.7). Then we look at AI systems as subjects, i.e. when ethics is for the AI systems themselves in machine ethics (2.8.) and artificial moral agency (2.9). Finally we look at future developments and the concept of AI (3). For each section within these themes, we provide a general explanation of the ethical issues, we outline existing positions and arguments, then we analyse how this plays out with current technologies and finally what policy consequences may be drawn.
There are no more papers matching your filters at the moment.
