12 May 2025
A planning framework addresses complex multi-robot task allocation for long-endurance missions by integrating heterogeneous capabilities, flexible task characteristics, and explicit robot recharging. It employs an optimal MILP for small-scale analysis and a scalable heuristic with online replanning for dynamic, real-world scenarios, demonstrating high solvability and efficient adaptation to unexpected events.
23 Dec 2014
In this paper, we review and extend a family of log-det divergences for
symmetric positive definite (SPD) matrices and discuss their fundamental
properties. We show how to generate from parameterized Alpha-Beta (AB) and
Gamma Log-det divergences many well known divergences, for example, the Stein's
loss, S-divergence, called also Jensen-Bregman LogDet (JBLD) divergence, the
Logdet Zero (Bhattacharryya) divergence, Affine Invariant Riemannian Metric
(AIRM) as well as some new divergences. Moreover, we establish links and
correspondences among many log-det divergences and display them on alpha-beta
plain for various set of parameters. Furthermore, this paper bridges these
divergences and shows also their links to divergences of multivariate and
multiway Gaussian distributions. Closed form formulas are derived for gamma
divergences of two multivariate Gaussian densities including as special cases
the Kullback-Leibler, Bhattacharryya, R\'enyi and Cauchy-Schwartz divergences.
Symmetrized versions of the log-det divergences are also discussed and
reviewed. A class of divergences is extended to multiway divergences for
separable covariance (precision) matrices.
15 Jul 2022
Flapping wings are a bio-inspired method to produce lift and thrust in aerial robots, leading to quiet and efficient motion. The advantages of this technology are safety and maneuverability, and physical interaction with the environment, humans, and animals. However, to enable substantial applications, these robots must perch and land. Despite recent progress in the perching field, flapping-wing vehicles, or ornithopters, are to this day unable to stop their flight on a branch. In this paper, we present a novel method that defines a process to reliably and autonomously land an ornithopter on a branch. This method describes the joint operation of a flapping-flight controller, a close-range correction system and a passive claw appendage. Flight is handled by a triple pitch-yaw-altitude controller and integrated body electronics, permitting perching at 3 m/s. The close-range correction system, with fast optical branch sensing compensates for position misalignment when landing. This is complemented by a passive bistable claw design can lock and hold 2 Nm of torque, grasp within 25 ms and can re-open thanks to an integrated tendon actuation. The perching method is supplemented by a four-step experimental development process which optimizes for a successful design. We validate this method with a 700 g ornithopter and demonstrate the first autonomous perching flight of a flapping-wing robot on a branch, a result replicated with a second robot. This work paves the way towards the application of flapping-wing robots for long-range missions, bird observation, manipulation, and outdoor flight.
13 Jan 2025
A unified Integer Programming framework is presented for extracting interpretable "if-then" rule lists from tree ensembles, offering enhanced flexibility across classification and regression tasks and working with diverse data types, including time series. The method quantifies internal explanation fidelity through novel measures, achieving competitive predictive performance while extracting fewer, more representative rules compared to state-of-the-art heuristic approaches.

08 Oct 2024
The problem of imputing multivariate time series spans a wide range of fields, from clinical healthcare to multi-sensor systems. Initially, Recurrent Neural Networks (RNNs) were employed for this task; however, their error accumulation issues led to the adoption of Transformers, leveraging attention mechanisms to mitigate these problems. Concurrently, the promising results of diffusion models in capturing original distributions have positioned them at the forefront of current research, often in conjunction with Transformers. In this paper, we propose replacing time-oriented Transformers with State-Space Models (SSM), which are better suited for temporal data modeling. Specifically, we utilize the latest SSM variant, S6, which incorporates attention-like mechanisms. By embedding S6 within Mamba blocks, we develop a model that integrates SSM, Graph Neural Networks, and node-oriented Transformers to achieve enhanced spatiotemporal representations. Implementing these architectural modifications, previously unexplored in this field, we present Time series Imputation with Bi-directional mamba blocks and diffusion models (TIMBA). TIMBA achieves superior performance in almost all benchmark scenarios and performs comparably in others across a diverse range of missing value situations and three real-world datasets. We also evaluate how the performance of our model varies with different amounts of missing values and analyse its performance on downstream tasks. In addition, we provide the original code to replicate the results.

31 Jan 2025

The irruption of DeepSeek-R1 constitutes a turning point for the AI industry in general and the LLMs in particular. Its capabilities have demonstrated outstanding performance in several tasks, including creative thinking, code generation, maths and automated program repair, at apparently lower execution cost. However, LLMs must adhere to an important qualitative property, i.e., their alignment with safety and human values. A clear competitor of DeepSeek-R1 is its American counterpart, OpenAI's o3-mini model, which is expected to set high standards in terms of performance, safety and cost. In this technical report, we systematically assess the safety level of both DeepSeek-R1 (70b version) and OpenAI's o3-mini (beta version). To this end, we make use of our recently released automated safety testing tool, named ASTRAL. By leveraging this tool, we automatically and systematically generated and executed 1,260 test inputs on both models. After conducting a semi-automated assessment of the outcomes provided by both LLMs, the results indicate that DeepSeek-R1 produces significantly more unsafe responses (12%) than OpenAI's o3-mini (1.2%).

17 Oct 2012
We introduce the logics GLP(\Lambda), a generalization of Japaridze's polymodal provability logic GLP(\omega) where \Lambda is any linearly ordered set representing a hierarchy of provability operators of increasing strength.
We shall provide a reduction of these logics to GLP(\omega) yielding among other things a finitary proof of the normal form theorem for the variable-free fragment of GLP(\Lambda) and the decidability of GLP(\Lambda) for recursive orderings \Lambda. Further, we give a restricted axiomatization of the variable-free fragment of GLP(\Lambda).

18 Dec 2024

Many of the primal ingredients of convex optimization extend naturally from Euclidean to Hadamard spaces nonpositively curved metric spaces like Euclidean, Hilbert, and hyperbolic spaces, metric trees, and more general CAT(0) cubical complexes. Linear structure, however, and the duality theory it supports are absent. Nonetheless, we introduce a new type of subgradient for convex functions on Hadamard spaces, based on Busemann functions. This notion supports a splitting subgradient method with guaranteed complexity bounds. In particular, the algorithm solves -mean problems in general Hadamard spaces: we illustrate by computing medians in BHV tree space.

30 Sep 2025
Radio-based methods such as Ultra-Wideband (UWB) and RAdio Detection And Ranging (radar), which have traditionally seen limited adoption in robotics, are experiencing a boost in popularity thanks to their robustness to harsh environmental conditions and cluttered environments. This work proposes a multi-robot UGV-UAV localization system that leverages the two technologies with inexpensive and readily-available sensors, such as Inertial Measurement Units (IMUs) and wheel encoders, to estimate the relative position of an aerial robot with respect to a ground robot. The first stage of the system pipeline includes a nonlinear optimization framework to trilaterate the location of the aerial platform based on UWB range data, and a radar pre-processing module with loosely coupled ego-motion estimation which has been adapted for a multi-robot scenario. Then, the pre-processed radar data as well as the relative transformation are fed to a pose-graph optimization framework with odometry and inter-robot constraints. The system, implemented for the Robotic Operating System (ROS 2) with the Ceres optimizer, has been validated in Software-in-the-Loop (SITL) simulations and in a real-world dataset. The proposed relative localization module outperforms state-of-the-art closed-form methods which are less robust to noise. Our SITL environment includes a custom Gazebo plugin for generating realistic UWB measurements modeled after real data. Conveniently, the proposed factor graph formulation makes the system readily extensible to full Simultaneous Localization And Mapping (SLAM). Finally, all the code and experimental data is publicly available to support reproducibility and to serve as a common open dataset for benchmarking.
22 Mar 2024
This study from the University of Seville and collaborators analyzes eight data reduction methods, demonstrating that Deep Learning model training time and CO2 emissions can be reduced by up to 67% without performance compromise, and introduces a methodology for applying these techniques to image-based object detection tasks. It also proposes a topological metric, "ϵ-representativeness," to quantify dataset similarity, showing its correlation with model performance for tabular data.
30 Jan 2025
Large Language Models (LLMs) have become an integral part of our daily lives. However, they impose certain risks, including those that can harm individuals' privacy, perpetuate biases and spread misinformation. These risks highlight the need for robust safety mechanisms, ethical guidelines, and thorough testing to ensure their responsible deployment. Safety of LLMs is a key property that needs to be thoroughly tested prior the model to be deployed and accessible to the general users. This paper reports the external safety testing experience conducted by researchers from Mondragon University and University of Seville on OpenAI's new o3-mini LLM as part of OpenAI's early access for safety testing program. In particular, we apply our tool, ASTRAL, to automatically and systematically generate up to date unsafe test inputs (i.e., prompts) that helps us test and assess different safety categories of LLMs. We automatically generate and execute a total of 10,080 unsafe test input on a early o3-mini beta version. After manually verifying the test cases classified as unsafe by ASTRAL, we identify a total of 87 actual instances of unsafe LLM behavior. We highlight key insights and findings uncovered during the pre-deployment external testing phase of OpenAI's latest LLM.
02 Apr 2024
To explore convex optimization on Hadamard spaces, we consider an iteration
in the style of a subgradient algorithm. Traditionally, such methods assume
that the underlying spaces are manifolds and that the objectives are
geodesically convex: the methods are described using tangent spaces and
exponential maps. By contrast, our iteration applies in a general Hadamard
space, is framed in the underlying space itself, and relies instead on
horospherical convexity of the objective level sets. For this restricted class
of objectives, we prove a complexity result of the usual form. Notably, the
complexity does not depend on a lower bound on the space curvature. We
illustrate our subgradient algorithm on the minimal enclosing ball problem in
Hadamard spaces.

17 Jun 2024
In this paper, we propose the Ordered Median Tree Location Problem (OMT). The
OMT is a single-allocation facility location problem where p facilities must be
placed on a network connected by a non-directed tree. The objective is to
minimize the sum of the ordered weighted averaged allocation costs plus the sum
of the costs of connecting the facilities in the tree. We present different
MILP formulations for the OMT based on properties of the minimum spanning tree
problem and the ordered median optimization. Given that ordered median hub
location problems are rather difficult to solve we have improved the OMT
solution performance by introducing covering variables in a valid reformulation
plus developing two pre-processing phases to reduce the size of this
formulations. In addition, we propose a Benders decomposition algorithm to
approach the OMT. We establish an empirical comparison between these new
formulations and we also provide enhancements that together with a proper
formulation allow to solve medium size instances on general random graphs.

06 Mar 2018

Convolutional neural networks (CNNs) have become the dominant neural network
architecture for solving many state-of-the-art (SOA) visual processing tasks.
Even though Graphical Processing Units (GPUs) are most often used in training
and deploying CNNs, their power efficiency is less than 10 GOp/s/W for
single-frame runtime inference. We propose a flexible and efficient CNN
accelerator architecture called NullHop that implements SOA CNNs useful for
low-power and low-latency application scenarios. NullHop exploits the sparsity
of neuron activations in CNNs to accelerate the computation and reduce memory
requirements. The flexible architecture allows high utilization of available
computing resources across kernel sizes ranging from 1x1 to 7x7. NullHop can
process up to 128 input and 128 output feature maps per layer in a single pass.
We implemented the proposed architecture on a Xilinx Zynq FPGA platform and
present results showing how our implementation reduces external memory
transfers and compute time in five different CNNs ranging from small ones up to
the widely known large VGG16 and VGG19 CNNs. Post-synthesis simulations using
Mentor Modelsim in a 28nm process with a clock frequency of 500 MHz show that
the VGG19 network achieves over 450 GOp/s. By exploiting sparsity, NullHop
achieves an efficiency of 368%, maintains over 98% utilization of the MAC
units, and achieves a power efficiency of over 3TOp/s/W in a core area of
6.3mm. As further proof of NullHop's usability, we interfaced its FPGA
implementation with a neuromorphic event camera for real time interactive
demonstrations.
29 Jan 2025
Large Language Models (LLMs) have recently gained attention due to their ability to understand and generate sophisticated human-like content. However, ensuring their safety is paramount as they might provide harmful and unsafe responses. Existing LLM testing frameworks address various safety-related concerns (e.g., drugs, terrorism, animal abuse) but often face challenges due to unbalanced and obsolete datasets. In this paper, we present ASTRAL, a tool that automates the generation and execution of test cases (i.e., prompts) for testing the safety of LLMs. First, we introduce a novel black-box coverage criterion to generate balanced and diverse unsafe test inputs across a diverse set of safety categories as well as linguistic writing characteristics (i.e., different style and persuasive writing techniques). Second, we propose an LLM-based approach that leverages Retrieval Augmented Generation (RAG), few-shot prompting strategies and web browsing to generate up-to-date test inputs. Lastly, similar to current LLM test automation techniques, we leverage LLMs as test oracles to distinguish between safe and unsafe test outputs, allowing a fully automated testing approach. We conduct an extensive evaluation on well-known LLMs, revealing the following key findings: i) GPT3.5 outperforms other LLMs when acting as the test oracle, accurately detecting unsafe responses, and even surpassing more recent LLMs (e.g., GPT-4), as well as LLMs that are specifically tailored to detect unsafe LLM outputs (e.g., LlamaGuard); ii) the results confirm that our approach can uncover nearly twice as many unsafe LLM behaviors with the same number of test inputs compared to currently used static datasets; and iii) our black-box coverage criterion combined with web browsing can effectively guide the LLM on generating up-to-date unsafe test inputs, significantly increasing the number of unsafe LLM behaviors.
21 Oct 2024
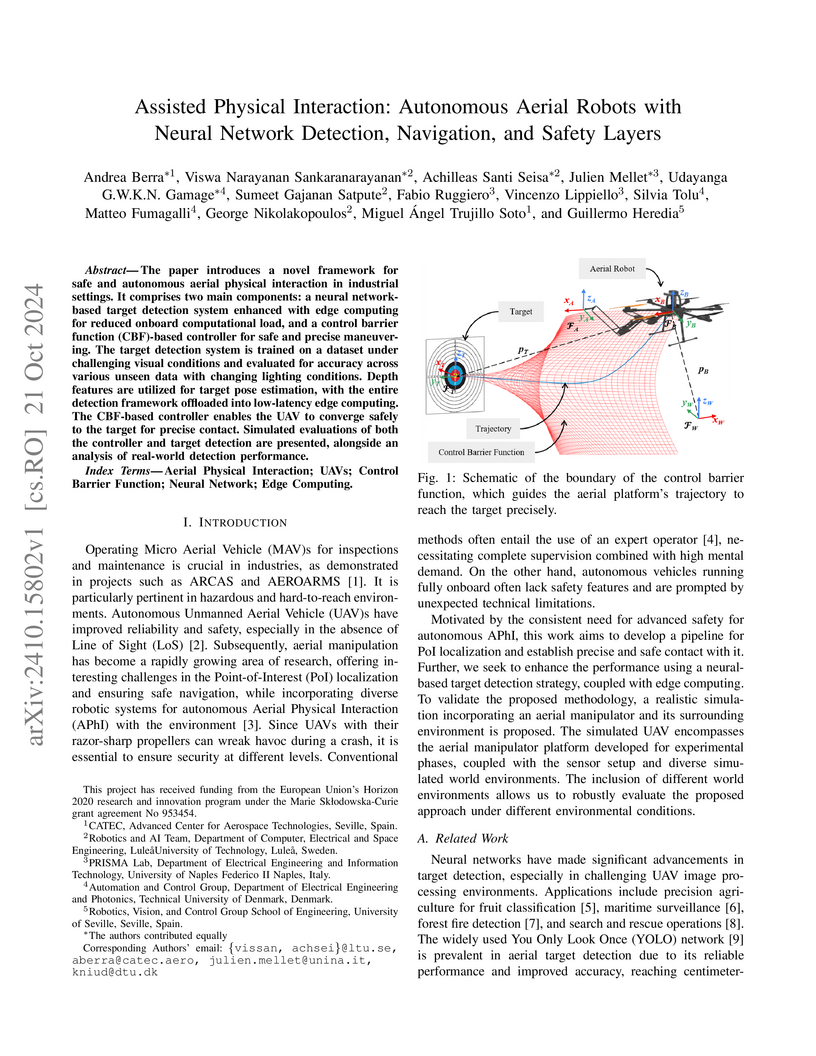
The paper introduces a novel framework for safe and autonomous aerial physical interaction in industrial settings. It comprises two main components: a neural network-based target detection system enhanced with edge computing for reduced onboard computational load, and a control barrier function (CBF)-based controller for safe and precise maneuvering. The target detection system is trained on a dataset under challenging visual conditions and evaluated for accuracy across various unseen data with changing lighting conditions. Depth features are utilized for target pose estimation, with the entire detection framework offloaded into low-latency edge computing. The CBF-based controller enables the UAV to converge safely to the target for precise contact. Simulated evaluations of both the controller and target detection are presented, alongside an analysis of real-world detection performance.

22 May 2025
In the present work, we further study the computational power of virus
machines (VMs in short).VMs provide a computing paradigm inspired by the
transmission and replication networks of viruses.VMs consist of process units
(called hosts) structured by a directed graph whose arcs are called channels
and an instruction graph that controls the transmissions of virus objects among
hosts. The present work complements our understanding of the computing power of
VMs by introducing normal forms; these expressions restrict the features in a
given computing model.Some of the features that we restrict in our normal forms
include (a) the number of hosts, (b) the number of instructions, and (c) the
number of virus objects in each host. After we recall some known results on the
computing power of VMs we give our series of normal forms, such as the size of
the loops in the network, proving new characterisations of family of sets, such
as finite sets, semilinear sets, or recursively enumerable sets (NRE).
23 Jan 2025
Since the last nuclear atmospheric test carried out by the People Republic of
China in 1980 and since the Chernobyl accident in 1986, the plutonium hasn't
been directly released into the atmosphere. However, nowadays, it is still
present in the troposphere. This is due to plutonium-bearing soil particles
physical resuspension processes. In this work, we study for the first time the
temporal variation of plutonium isotopes, 239Pu and 240Pu, baseline
concentrations on a monthly basis in surface air from Seville (Spain), and
their correlation with some tracers of mineral dust, during 2001 and 2002. The
Pu analyses were performed by low-energy Accelerator Mass Spectrometry (AMS).
The 239Pu plus 240Pu (239+240Pu) activity levels achieved maximums during the
summer period, characterized by the absence of rains, and minimums during the
rainy seasons, laying in the range 1-20 nBq per cubic meter. The 240Pu/239Pu
two-year average atomic ratio was 0.18(0.03), in agreement with the fallout
plutonium. A good correlation with Pu and Al and Ti levels is observed. They
are crustal components usually used as tracers of African dust over European
countries. The hypothesis of the influence of the Saharan dust intrusions is
supported as well through the study of Total Ozone Mass Spectrometer (TOMS)
daily images.

09 Sep 2025
While it is well-established that artificial neural networks are universal approximators for continuous functions on compact domains, many modern approaches rely on deep or overparameterized architectures that incur high computational costs. In this paper, a new type of small shallow neural network, called the Barycentric Neural Network (BNN), is proposed, which leverages a fixed set of base points and their barycentric coordinates to define both its structure and its parameters. We demonstrate that our BNN enables the exact representation of continuous piecewise linear functions (CPLFs), ensuring strict continuity across segments. Since any continuous function over a compact domain can be approximated arbitrarily well by CPLFs, the BNN naturally emerges as a flexible and interpretable tool for function approximation. Beyond the use of this representation, the main contribution of the paper is the introduction of a new variant of persistent entropy, a topological feature that is stable and scale invariant, called the length-weighted persistent entropy (LWPE), which is weighted by the lifetime of topological features. Our framework, which combines the BNN with a loss function based on our LWPE, aims to provide flexible and geometrically interpretable approximations of nonlinear continuous functions in resource-constrained settings, such as those with limited base points for BNN design and few training epochs. Instead of optimizing internal weights, our approach directly optimizes the base points that define the BNN. Experimental results show that our approach achieves superior and faster approximation performance compared to classical loss functions such as MSE, RMSE, MAE, and log-cosh.

26 Jul 2025
Multivariate Time Series Imputation (MTSI) is crucial for many applications, such as healthcare monitoring and traffic management, where incomplete data can compromise decision-making. Existing state-of-the-art methods, like Denoising Diffusion Probabilistic Models (DDPMs), achieve high imputation accuracy; however, they suffer from significant computational costs and are notably time-consuming due to their iterative nature. In this work, we propose CoSTI, an innovative adaptation of Consistency Models (CMs) for the MTSI domain. CoSTI employs Consistency Training to achieve comparable imputation quality to DDPMs while drastically reducing inference times, making it more suitable for real-time applications. We evaluate CoSTI across multiple datasets and missing data scenarios, demonstrating up to a 98% reduction in imputation time with performance on par with diffusion-based models. This work bridges the gap between efficiency and accuracy in generative imputation tasks, providing a scalable solution for handling missing data in critical spatio-temporal systems.
There are no more papers matching your filters at the moment.
