20 Mar 2023
MuSE-SVS is a neural singing voice synthesizer that enables multi-singer emotional synthesis with controllable intensity, outperforming baselines in voice quality, naturalness, and emotional similarity. It achieves highly accurate pitch modeling and synchronization, reducing cumulative synchronization error to 0.2% for long songs.
28 Feb 2022
UniTTS, developed by researchers at Handong Global University, enhances expressive speech synthesis by employing residual learning in a unified embedding space to precisely control overlapping style attributes like speaker ID and emotion. The model achieves higher Mean Opinion Scores for fidelity (3.77), speaker similarity (3.88), and emotion similarity (4.15) compared to baseline methods, enabling interference-free style control.

21 Mar 2024
Bolus segmentation is crucial for the automated detection of swallowing
disorders in videofluoroscopic swallowing studies (VFSS). However, it is
difficult for the model to accurately segment a bolus region in a VFSS image
because VFSS images are translucent, have low contrast and unclear region
boundaries, and lack color information. To overcome these challenges, we
propose PECI-Net, a network architecture for VFSS image analysis that combines
two novel techniques: the preprocessing ensemble network (PEN) and the cascaded
inference network (CIN). PEN enhances the sharpness and contrast of the VFSS
image by combining multiple preprocessing algorithms in a learnable way. CIN
reduces ambiguity in bolus segmentation by using context from other regions
through cascaded inference. Moreover, CIN prevents undesirable side effects
from unreliably segmented regions by referring to the context in an asymmetric
way. In experiments, PECI-Net exhibited higher performance than four recently
developed baseline models, outperforming TernausNet, the best among the
baseline models, by 4.54\% and the widely used UNet by 10.83\%. The results of
the ablation studies confirm that CIN and PEN are effective in improving bolus
segmentation performance.

13 May 2025
This survey provides a structured overview of hallucinations in code-generating Large Language Models (LLMs), proposing a detailed, objective taxonomy for various error types. Researchers from UNIST, Handong Global University, Korea University, and Seoul National University of Science and Technology collaborated to review existing benchmarks, identify root causes, and analyze mitigation strategies, addressing a critical gap in CodeLLM reliability research.

30 Jul 2020
Researchers at NCSOFT's Speech AI Lab and Handong Global University developed VocGAN, a neural vocoder that addresses quality limitations of fast vocoders like MelGAN by introducing a hierarchically-nested adversarial network and joint conditional/unconditional loss. It achieves a MOS of 4.202, outperforming MelGAN (3.898) and Parallel WaveGAN (4.098), while maintaining 3.24x real-time inference on CPU.

05 May 2025
In this paper,we explore the application of Back translation (BT) as a
semi-supervised technique to enhance Neural Machine Translation(NMT) models for
the English-Luganda language pair, specifically addressing the challenges faced
by low-resource languages. The purpose of our study is to demonstrate how BT
can mitigate the scarcity of bilingual data by generating synthetic data from
monolingual corpora. Our methodology involves developing custom NMT models
using both publicly available and web-crawled data, and applying Iterative and
Incremental Back translation techniques. We strategically select datasets for
incremental back translation across multiple small datasets, which is a novel
element of our approach. The results of our study show significant
improvements, with translation performance for the English-Luganda pair
exceeding previous benchmarks by more than 10 BLEU score units across all
translation directions. Additionally, our evaluation incorporates comprehensive
assessment metrics such as SacreBLEU, ChrF2, and TER, providing a nuanced
understanding of translation quality. The conclusion drawn from our research
confirms the efficacy of BT when strategically curated datasets are utilized,
establishing new performance benchmarks and demonstrating the potential of BT
in enhancing NMT models for low-resource languages.
15 Dec 2022
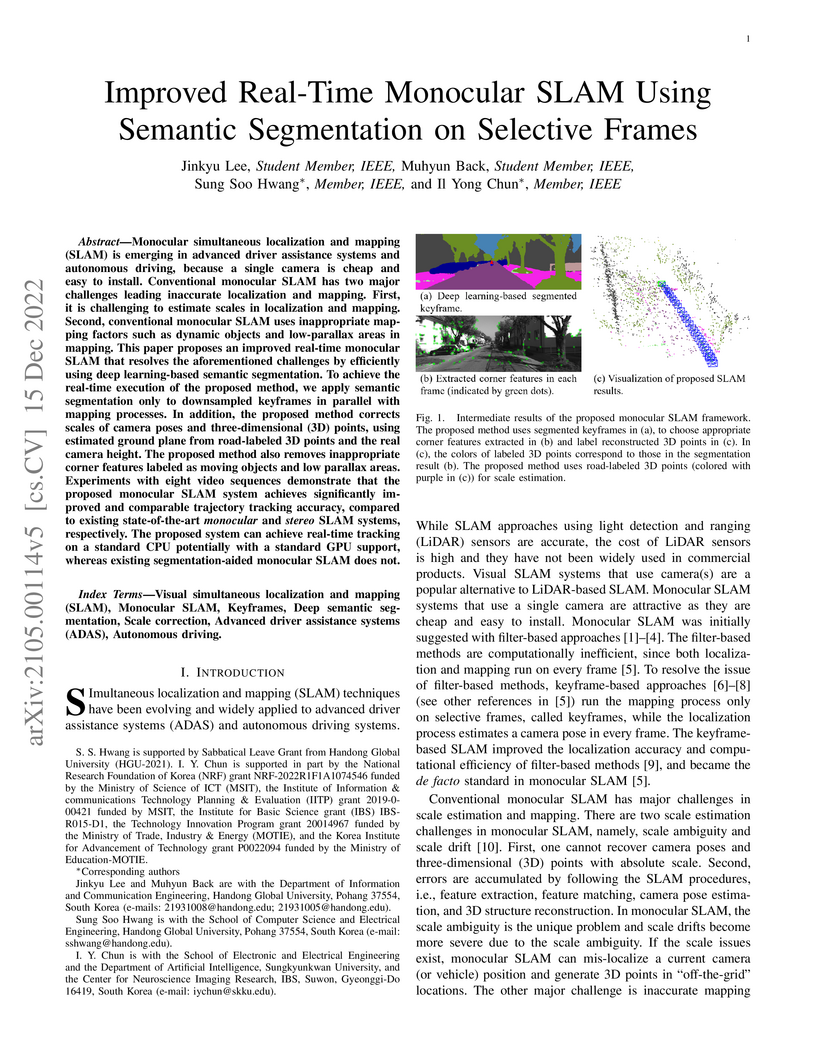
Monocular simultaneous localization and mapping (SLAM) is emerging in
advanced driver assistance systems and autonomous driving, because a single
camera is cheap and easy to install. Conventional monocular SLAM has two major
challenges leading inaccurate localization and mapping. First, it is
challenging to estimate scales in localization and mapping. Second,
conventional monocular SLAM uses inappropriate mapping factors such as dynamic
objects and low-parallax areas in mapping. This paper proposes an improved
real-time monocular SLAM that resolves the aforementioned challenges by
efficiently using deep learning-based semantic segmentation. To achieve the
real-time execution of the proposed method, we apply semantic segmentation only
to downsampled keyframes in parallel with mapping processes. In addition, the
proposed method corrects scales of camera poses and three-dimensional (3D)
points, using estimated ground plane from road-labeled 3D points and the real
camera height. The proposed method also removes inappropriate corner features
labeled as moving objects and low parallax areas. Experiments with eight video
sequences demonstrate that the proposed monocular SLAM system achieves
significantly improved and comparable trajectory tracking accuracy, compared to
existing state-of-the-art monocular and stereo SLAM systems, respectively. The
proposed system can achieve real-time tracking on a standard CPU potentially
with a standard GPU support, whereas existing segmentation-aided monocular SLAM
does not.

09 May 2025
In autonomous driving, the end-to-end (E2E) driving approach that predicts
vehicle control signals directly from sensor data is rapidly gaining attention.
To learn a safe E2E driving system, one needs an extensive amount of driving
data and human intervention. Vehicle control data is constructed by many hours
of human driving, and it is challenging to construct large vehicle control
datasets. Often, publicly available driving datasets are collected with limited
driving scenes, and collecting vehicle control data is only available by
vehicle manufacturers. To address these challenges, this letter proposes the
first fully self-supervised learning framework, self-supervised imitation
learning (SSIL), for E2E driving, based on the self-supervised regression
learning (SSRL) framework.The proposed SSIL framework can learn E2E driving
networks \emph{without} using driving command data or a pre-trained model. To
construct pseudo steering angle data, proposed SSIL predicts a pseudo target
from the vehicle's poses at the current and previous time points that are
estimated with light detection and ranging sensors. In addition, we propose two
E2E driving networks that predict driving commands depending on high-level
instruction. Our numerical experiments with three different benchmark datasets
demonstrate that the proposed SSIL framework achieves \emph{very} comparable
E2E driving accuracy with the supervised learning counterpart. The proposed
pseudo-label predictor outperformed an existing one using proportional integral
derivative controller.
22 May 2025

Unsupervised anomaly detection (UAD) in medical imaging is crucial for
identifying pathological abnormalities without requiring extensive labeled
data. However, existing diffusion-based UAD models rely solely on imaging
features, limiting their ability to distinguish between normal anatomical
variations and pathological anomalies. To address this, we propose Diff3M, a
multi-modal diffusion-based framework that integrates chest X-rays and
structured Electronic Health Records (EHRs) for enhanced anomaly detection.
Specifically, we introduce a novel image-EHR cross-attention module to
incorporate structured clinical context into the image generation process,
improving the model's ability to differentiate normal from abnormal features.
Additionally, we develop a static masking strategy to enhance the
reconstruction of normal-like images from anomalies. Extensive evaluations on
CheXpert and MIMIC-CXR/IV demonstrate that Diff3M achieves state-of-the-art
performance, outperforming existing UAD methods in medical imaging. Our code is
available at this http URL this https URL

05 Sep 2024
Causal language modeling (CLM) serves as the foundational framework underpinning remarkable successes of recent large language models (LLMs). Despite its success, the training approach for next word prediction poses a potential risk of causing the model to overly focus on local dependencies within a sentence. While prior studies have been introduced to predict future N words simultaneously, they were primarily applied to tasks such as masked language modeling (MLM) and neural machine translation (NMT). In this study, we introduce a simple N-gram prediction framework for the CLM task. Moreover, we introduce word difference representation (WDR) as a surrogate and contextualized target representation during model training on the basis of N-gram prediction framework. To further enhance the quality of next word prediction, we propose an ensemble method that incorporates the future N words' prediction results. Empirical evaluations across multiple benchmark datasets encompassing CLM and NMT tasks demonstrate the significant advantages of our proposed methods over the conventional CLM.
19 Sep 2021
For years, adversarial training has been extensively studied in natural
language processing (NLP) settings. The main goal is to make models robust so
that similar inputs derive in semantically similar outcomes, which is not a
trivial problem since there is no objective measure of semantic similarity in
language. Previous works use an external pre-trained NLP model to tackle this
challenge, introducing an extra training stage with huge memory consumption
during training. However, the recent popular approach of contrastive learning
in language processing hints a convenient way of obtaining such similarity
restrictions. The main advantage of the contrastive learning approach is that
it aims for similar data points to be mapped close to each other and further
from different ones in the representation space. In this work, we propose
adversarial training with contrastive learning (ATCL) to adversarially train a
language processing task using the benefits of contrastive learning. The core
idea is to make linear perturbations in the embedding space of the input via
fast gradient methods (FGM) and train the model to keep the original and
perturbed representations close via contrastive learning. In NLP experiments,
we applied ATCL to language modeling and neural machine translation tasks. The
results show not only an improvement in the quantitative (perplexity and BLEU)
scores when compared to the baselines, but ATCL also achieves good qualitative
results in the semantic level for both tasks without using a pre-trained model.

13 Jul 2021
Recent achievements in end-to-end deep learning have encouraged the exploration of tasks dealing with highly structured data with unified deep network models. Having such models for compressing audio signals has been challenging since it requires discrete representations that are not easy to train with end-to-end backpropagation. In this paper, we present an end-to-end deep learning approach that combines recurrent neural networks (RNNs) within the training strategy of variational autoencoders (VAEs) with a binary representation of the latent space. We apply a reparametrization trick for the Bernoulli distribution for the discrete representations, which allows smooth backpropagation. In addition, our approach allows the separation of the encoder and decoder, which is necessary for compression tasks. To our best knowledge, this is the first end-to-end learning for a single audio compression model with RNNs, and our model achieves a Signal to Distortion Ratio (SDR) of 20.54.
31 Jul 2019
To address the issue of catastrophic forgetting in neural networks, we propose a novel, simple, and effective solution called neuron-level plasticity control (NPC). While learning a new task, the proposed method preserves the knowledge for the previous tasks by controlling the plasticity of the network at the neuron level. NPC estimates the importance value of each neuron and consolidates important \textit{neurons} by applying lower learning rates, rather than restricting individual connection weights to stay close to certain values. The experimental results on the incremental MNIST (iMNIST) and incremental CIFAR100 (iCIFAR100) datasets show that neuron-level consolidation is substantially more effective compared to the connection-level consolidation approaches.
09 Oct 2019
As one of standard approaches to train deep neural networks, dropout has been
applied to regularize large models to avoid overfitting, and the improvement in
performance by dropout has been explained as avoiding co-adaptation between
nodes. However, when correlations between nodes are compared after training the
networks with or without dropout, one question arises if co-adaptation
avoidance explains the dropout effect completely. In this paper, we propose an
additional explanation of why dropout works and propose a new technique to
design better activation functions. First, we show that dropout can be
explained as an optimization technique to push the input towards the saturation
area of nonlinear activation function by accelerating gradient information
flowing even in the saturation area in backpropagation. Based on this
explanation, we propose a new technique for activation functions, {\em gradient
acceleration in activation function (GAAF)}, that accelerates gradients to flow
even in the saturation area. Then, input to the activation function can climb
onto the saturation area which makes the network more robust because the model
converges on a flat region. Experiment results support our explanation of
dropout and confirm that the proposed GAAF technique improves image
classification performance with expected properties.

02 Aug 2019
Since deep learning became a key player in natural language processing (NLP),
many deep learning models have been showing remarkable performances in a
variety of NLP tasks, and in some cases, they are even outperforming humans.
Such high performance can be explained by efficient knowledge representation of
deep learning models. While many methods have been proposed to learn more
efficient representation, knowledge distillation from pretrained deep networks
suggest that we can use more information from the soft target probability to
train other neural networks. In this paper, we propose a new knowledge
distillation method self-knowledge distillation, based on the soft target
probabilities of the training model itself, where multimode information is
distilled from the word embedding space right below the softmax layer. Due to
the time complexity, our method approximates the soft target probabilities. In
experiments, we applied the proposed method to two different and fundamental
NLP tasks: language model and neural machine translation. The experiment
results show that our proposed method improves performance on the tasks.
24 Aug 2020

This paper presents a novel automatic calibration system to estimate the
extrinsic parameters of LiDAR mounted on a mobile platform for sensor
misalignment inspection in the large-scale production of highly automated
vehicles. To obtain subdegree and subcentimeter accuracy levels of extrinsic
calibration, this study proposed a new concept of a target board with embedded
photodetector arrays, named the PD-target system, to find the precise position
of the correspondence laser beams on the target surface. Furthermore, the
proposed system requires only the simple design of the target board at the
fixed pose in a close range to be readily applicable in the automobile
manufacturing environment. The experimental evaluation of the proposed system
on low-resolution LiDAR showed that the LiDAR offset pose can be estimated
within 0.1 degree and 3 mm levels of precision. The high accuracy and
simplicity of the proposed calibration system make it practical for large-scale
applications for the reliability and safety of autonomous systems.
24 Aug 2020
A misalignment of LiDAR as low as a few degrees could cause a significant
error in obstacle detection and mapping that could cause safety and quality
issues. In this paper, an accurate inspection system is proposed for estimating
a LiDAR alignment error after sensor attachment on a mobility system such as a
vehicle or robot. The proposed method uses only a single target board at the
fixed position to estimate the three orientations (roll, tilt, and yaw) and the
horizontal position of the LiDAR attachment with sub-degree and millimeter
level accuracy. After the proposed preprocessing steps, the feature beam points
that are the closest to each target corner are extracted and used to calculate
the sensor attachment pose with respect to the target board frame using a
nonlinear optimization method and with a low computational cost. The
performance of the proposed method is evaluated using a test bench that can
control the reference yaw and horizontal translation of LiDAR within ranges of
3 degrees and 30 millimeters, respectively. The experimental results for a
low-resolution 16 channel LiDAR (Velodyne VLP-16) confirmed that misalignment
could be estimated with accuracy within 0.2 degrees and 4 mm. The high accuracy
and simplicity of the proposed system make it practical for large-scale
industrial applications such as automobile or robot manufacturing process that
inspects the sensor attachment for the safety quality control.
11 Sep 2020
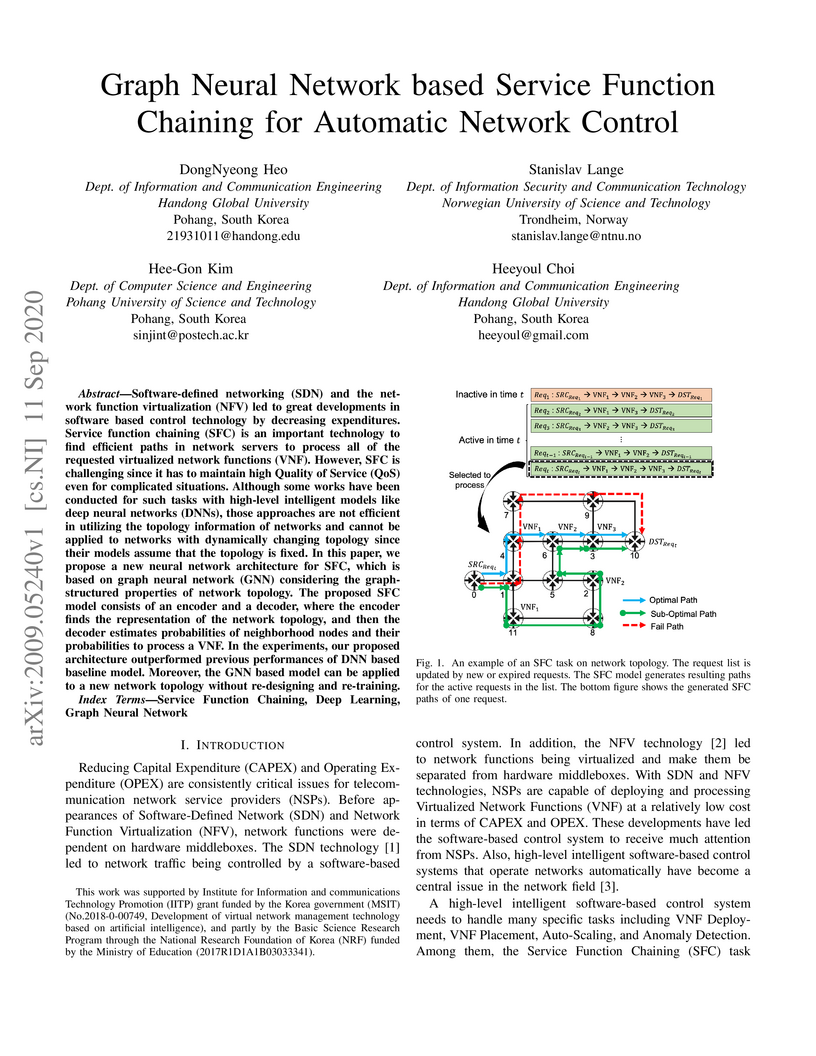
Software-defined networking (SDN) and the network function virtualization
(NFV) led to great developments in software based control technology by
decreasing expenditures. Service function chaining (SFC) is an important
technology to find efficient paths in network servers to process all of the
requested virtualized network functions (VNF). However, SFC is challenging
since it has to maintain high Quality of Service (QoS) even for complicated
situations. Although some works have been conducted for such tasks with
high-level intelligent models like deep neural networks (DNNs), those
approaches are not efficient in utilizing the topology information of networks
and cannot be applied to networks with dynamically changing topology since
their models assume that the topology is fixed. In this paper, we propose a new
neural network architecture for SFC, which is based on graph neural network
(GNN) considering the graph-structured properties of network topology. The
proposed SFC model consists of an encoder and a decoder, where the encoder
finds the representation of the network topology, and then the decoder
estimates probabilities of neighborhood nodes and their probabilities to
process a VNF. In the experiments, our proposed architecture outperformed
previous performances of DNN based baseline model. Moreover, the GNN based
model can be applied to a new network topology without re-designing and
re-training.
16 Nov 2020
For deployment on an embedded processor for autonomous driving, the object
detection network should satisfy all of the accuracy, real-time inference, and
light model size requirements. Conventional deep CNN-based detectors aim for
high accuracy, making their model size heavy for an embedded system with
limited memory space. In contrast, lightweight object detectors are greatly
compressed but at a significant sacrifice of accuracy. Therefore, we propose
FRDet, a lightweight one-stage object detector that is balanced to satisfy all
the constraints of accuracy, model size, and real-time processing on an
embedded GPU processor for autonomous driving applications. Our network aims to
maximize the compression of the model while achieving or surpassing YOLOv3
level of accuracy. This paper proposes the Fire-Residual (FR) module to design
a lightweight network with low accuracy loss by adapting fire modules with
residual skip connections. In addition, the Gaussian uncertainty modeling of
the bounding box is applied to further enhance the localization accuracy.
Experiments on the KITTI dataset showed that FRDet reduced the memory size by
50.8% but achieved higher accuracy by 1.12% mAP compared to YOLOv3. Moreover,
the real-time detection speed reached 31.3 FPS on an embedded GPU board(NVIDIA
Xavier). The proposed network achieved higher compression with comparable
accuracy compared to other deep CNN object detectors while showing improved
accuracy than the lightweight detector baselines. Therefore, the proposed FRDet
is a well-balanced and efficient object detector for practical application in
autonomous driving that can satisfies all the criteria of accuracy, real-time
inference, and light model size.

21 Mar 2025

Recent 3D face editing methods using masks have produced high-quality edited
images by leveraging Neural Radiance Fields (NeRF). Despite their impressive
performance, existing methods often provide limited user control due to the use
of pre-trained segmentation masks. To utilize masks with a desired layout, an
extensive training dataset is required, which is challenging to gather. We
present FFaceNeRF, a NeRF-based face editing technique that can overcome the
challenge of limited user control due to the use of fixed mask layouts. Our
method employs a geometry adapter with feature injection, allowing for
effective manipulation of geometry attributes. Additionally, we adopt latent
mixing for tri-plane augmentation, which enables training with a few samples.
This facilitates rapid model adaptation to desired mask layouts, crucial for
applications in fields like personalized medical imaging or creative face
editing. Our comparative evaluations demonstrate that FFaceNeRF surpasses
existing mask based face editing methods in terms of flexibility, control, and
generated image quality, paving the way for future advancements in customized
and high-fidelity 3D face editing. The code is available on the
{\href{this https URL}{project-page}}.
There are no more papers matching your filters at the moment.
