
28 Jan 2024
This tutorial aims to provide an intuitive introduction to Gaussian process regression (GPR). GPR models have been widely used in machine learning applications due to their representation flexibility and inherent capability to quantify uncertainty over predictions. The tutorial starts with explaining the basic concepts that a Gaussian process is built on, including multivariate normal distribution, kernels, non-parametric models, and joint and conditional probability. It then provides a concise description of GPR and an implementation of a standard GPR algorithm. In addition, the tutorial reviews packages for implementing state-of-the-art Gaussian process algorithms. This tutorial is accessible to a broad audience, including those new to machine learning, ensuring a clear understanding of GPR fundamentals.

13 Mar 2025
The Chat-TS framework integrates time-series data into large language models, enabling them to reason over both numerical time-series and natural language simultaneously. This framework achieved approximately 13% higher performance on multi-modal reasoning tasks compared to existing methods while maintaining the LLMs' natural language proficiency.
03 Dec 2025
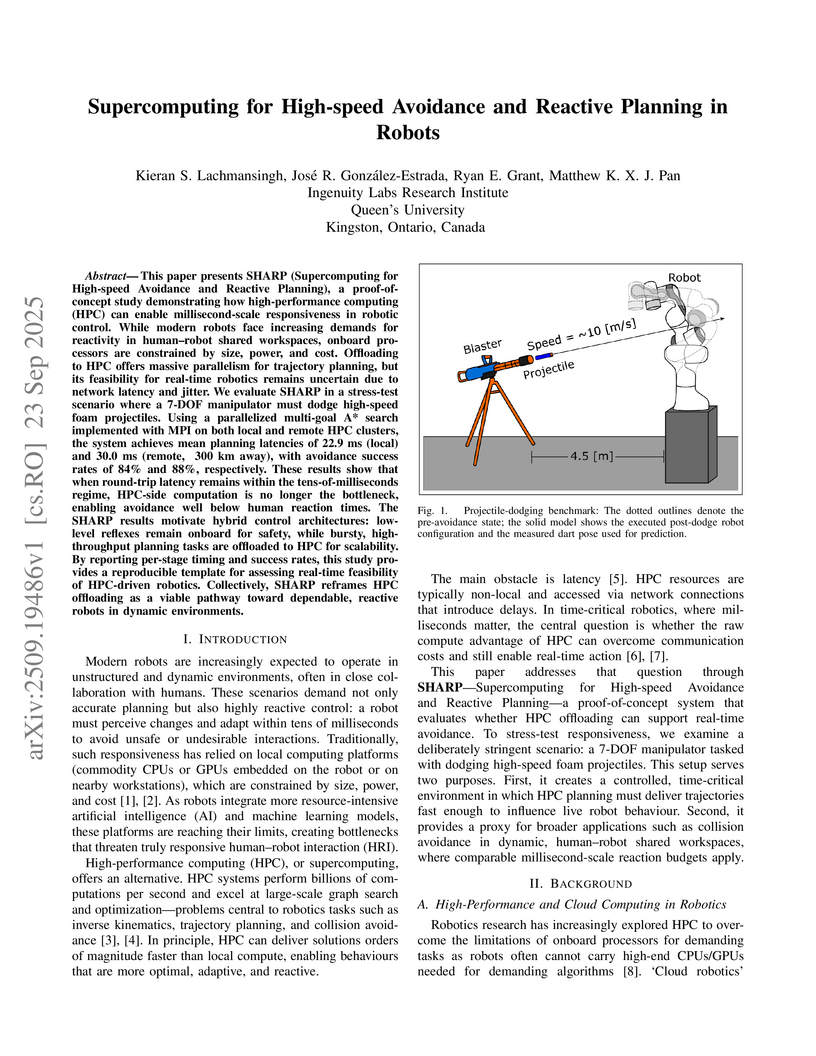
This paper presents SHARP (Supercomputing for High-speed Avoidance and Reactive Planning), a proof-of-concept study demonstrating how high-performance computing (HPC) can enable millisecond-scale responsiveness in robotic control. While modern robots face increasing demands for reactivity in human--robot shared workspaces, onboard processors are constrained by size, power, and cost. Offloading to HPC offers massive parallelism for trajectory planning, but its feasibility for real-time robotics remains uncertain due to network latency and jitter. We evaluate SHARP in a stress-test scenario where a 7-DOF manipulator must dodge high-speed foam projectiles. Using a parallelized multi-goal A* search implemented with MPI on both local and remote HPC clusters, the system achieves mean planning latencies of 22.9 ms (local) and 30.0 ms (remote, ~300 km away), with avoidance success rates of 84% and 88%, respectively. These results show that when round-trip latency remains within the tens-of-milliseconds regime, HPC-side computation is no longer the bottleneck, enabling avoidance well below human reaction times. The SHARP results motivate hybrid control architectures: low-level reflexes remain onboard for safety, while bursty, high-throughput planning tasks are offloaded to HPC for scalability. By reporting per-stage timing and success rates, this study provides a reproducible template for assessing real-time feasibility of HPC-driven robotics. Collectively, SHARP reframes HPC offloading as a viable pathway toward dependable, reactive robots in dynamic environments.

12 Sep 2024

Generative AI models, such as the GPT and Llama series, have significant potential to assist laypeople in answering legal questions. However, little prior work focuses on the data sourcing, inference, and evaluation of these models in the context of laypersons. To this end, we propose a human-centric legal NLP pipeline, covering data sourcing, inference, and evaluation. We introduce and release a dataset, LegalQA, with real and specific legal questions spanning from employment law to criminal law, corresponding answers written by legal experts, and citations for each answer. We develop an automatic evaluation protocol for this dataset, then show that retrieval-augmented generation from only 850 citations in the train set can match or outperform internet-wide retrieval, despite containing 9 orders of magnitude less data. Finally, we propose future directions for open-sourced efforts, which fall behind closed-sourced models.

02 Jul 2024
With the widespread adoption of large language models (LLMs) in numerous applications, the challenge of factuality and the propensity for hallucinations has emerged as a significant concern. To address this issue, particularly in retrieval-augmented in-context learning, we introduce the hierarchical graph of thoughts (HGOT), a structured, multi-layered graph approach designed to enhance the retrieval of pertinent passages during in-context learning. The framework utilizes the emergent planning capabilities of LLMs, employing the divide-and-conquer strategy to break down complex queries into manageable sub-queries. It refines self-consistency majority voting for answer selection, which incorporates the recently proposed citation recall and precision metrics to assess the quality of thoughts, linking an answer's credibility intrinsically to the thought's quality. This methodology introduces a weighted system in majority voting, prioritizing answers based on the citation quality of their thoughts. Additionally, we propose a scoring mechanism for evaluating retrieved passages, considering factors such as citation frequency and quality, self-consistency confidence, and the retrieval module's ranking. Experiments indicate that HGOT excels as a versatile approach, outperforming competing models in FEVER by up to and matching leading models such as Retrieve-then-Read in Open-SQuAD, and DSP in HotPotQA, demonstrating its efficacy in enhancing LLMs' factuality.

26 Oct 2022
The invention of transformer-based models such as BERT, GPT, and RoBERTa has enabled researchers and financial companies to finetune these powerful models and use them in different downstream tasks to achieve state-of-the-art performance. Recently, a lightweight alternative (approximately 0.1% - 3% of the original model parameters) to fine-tuning, known as prefix tuning has been introduced. This method freezes the model parameters and only updates the prefix to achieve performance comparable to full fine-tuning. Prefix tuning enables researchers and financial practitioners to achieve similar results with much fewer parameters. In this paper, we explore the robustness of prefix tuning when facing noisy data. Our experiments demonstrate that fine-tuning is more robust to noise than prefix tuning -- the latter method faces a significant decrease in performance on most corrupted data sets with increasing noise levels. Furthermore, prefix tuning has high variances in the F1 scores compared to fine-tuning in many corruption methods. We strongly advocate that caution should be carefully taken when applying the state-of-the-art prefix tuning method to noisy data.

09 Jul 2025
Robust verbal confidence generated by large language models (LLMs) is crucial for the deployment of LLMs to ensure transparency, trust, and safety in human-AI interactions across many high-stakes applications. In this paper, we present the first comprehensive study on the robustness of verbal confidence under adversarial attacks. We introduce a novel framework for attacking verbal confidence scores through both perturbation and jailbreak-based methods, and show that these attacks can significantly jeopardize verbal confidence estimates and lead to frequent answer changes. We examine a variety of prompting strategies, model sizes, and application domains, revealing that current confidence elicitation methods are vulnerable and that commonly used defence techniques are largely ineffective or counterproductive. Our findings underscore the urgent need to design more robust mechanisms for confidence expression in LLMs, as even subtle semantic-preserving modifications can lead to misleading confidence in responses.

17 Oct 2025
As language models have a greater impact on society, it is important to ensure they are aligned to a diverse range of perspectives and are able to reflect nuance in human values. However, the most popular training paradigms for modern language models often assume there is one optimal answer for every query, leading to generic responses and poor alignment. In this work, we aim to enhance pluralistic alignment of language models in a low-resource setting with two methods: pluralistic decoding and model steering. We empirically demonstrate that model steering offers consistent improvement over zero-shot and few-shot baselines with only 50 annotated samples. Our proposed methods decrease false positives in several high-stakes tasks such as hate speech detection and misinformation detection, and improves the distributional alignment to human values in GlobalOpinionQA. We hope our work highlights the importance of diversity and how language models can be adapted to consider nuanced perspectives.

26 Aug 2025
This paper introduces FlipWalker, a novel underactuated robot locomotion system inspired by Jacob's Ladder illusion toy, designed to traverse challenging terrains where wheeled robots often struggle. Like the Jacob's Ladder toy, FlipWalker features two interconnected segments joined by flexible cables, enabling it to pivot and flip around singularities in a manner reminiscent of the toy's cascading motion. Actuation is provided by motor-driven legs within each segment that push off either the ground or the opposing segment, depending on the robot's current configuration. A physics-based model of the underactuated flipping dynamics is formulated to elucidate the critical design parameters governing forward motion and obstacle clearance or climbing. The untethered prototype weighs 0.78 kg, achieves a maximum flipping speed of 0.2 body lengths per second. Experimental trials on artificial grass, river rocks, and snow demonstrate that FlipWalker's flipping strategy, which relies on ground reaction forces applied normal to the surface, offers a promising alternative to traditional locomotion for navigating irregular outdoor terrain.

07 Sep 2021
Conversation disentanglement aims to separate intermingled messages into detached sessions, which is a fundamental task in understanding multi-party conversations. Existing work on conversation disentanglement relies heavily upon human-annotated datasets, which are expensive to obtain in practice. In this work, we explore to train a conversation disentanglement model without referencing any human annotations. Our method is built upon a deep co-training algorithm, which consists of two neural networks: a message-pair classifier and a session classifier. The former is responsible for retrieving local relations between two messages while the latter categorizes a message to a session by capturing context-aware information. Both networks are initialized respectively with pseudo data built from an unannotated corpus. During the deep co-training process, we use the session classifier as a reinforcement learning component to learn a session assigning policy by maximizing the local rewards given by the message-pair classifier. For the message-pair classifier, we enrich its training data by retrieving message pairs with high confidence from the disentangled sessions predicted by the session classifier. Experimental results on the large Movie Dialogue Dataset demonstrate that our proposed approach achieves competitive performance compared to the previous supervised methods. Further experiments show that the predicted disentangled conversations can promote the performance on the downstream task of multi-party response selection.

29 Oct 2024
Landing a multirotor unmanned aerial vehicle (UAV) on an uncrewed surface vessel (USV) extends the operational range and offers recharging capabilities for maritime and limnology applications, such as search-and-rescue and environmental monitoring. However, autonomous UAV landings on USVs are challenging due to the unpredictable tilt and motion of the vessel caused by waves. This movement introduces spatial and temporal uncertainties, complicating safe, precise landings. Existing autonomous landing techniques on unmanned ground vehicles (UGVs) rely on shared state information, often causing time delays due to communication limits. This paper introduces a learning-based distributed Model Predictive Control (MPC) framework for autonomous UAV landings on USVs in wave-like conditions. Each vehicle's MPC optimizes for an artificial goal and input, sharing only the goal with the other vehicle. These goals are penalized by coupling and platform tilt costs, learned as a Gaussian Process (GP). We validate our framework in comprehensive indoor experiments using a custom-designed platform attached to a UGV to simulate USV tilting motion. Our approach achieves a 53% increase in landing success compared to an approach that neglects the impact of tilt motion on landing.

15 Aug 2021
Facial expression recognition (FER) has emerged as an important component of human-computer interaction systems. Despite recent advancements in FER, performance often drops significantly for non-frontal facial images. We propose Contrastive Learning of Multi-view facial Expressions (CL-MEx) to exploit facial images captured simultaneously from different angles towards FER. CL-MEx is a two-step training framework. In the first step, an encoder network is pre-trained with the proposed self-supervised contrastive loss, where it learns to generate view-invariant embeddings for different views of a subject. The model is then fine-tuned with labeled data in a supervised setting. We demonstrate the performance of the proposed method on two multi-view FER datasets, KDEF and DDCF, where state-of-the-art performances are achieved. Further experiments show the robustness of our method in dealing with challenging angles and reduced amounts of labeled data.

05 Jun 2025
While Large Language Models (LLMs) are transforming numerous applications, their susceptibility to conversational breakdowns remains a critical challenge undermining user trust. This paper introduces a "Detect, Explain, Escalate" framework to manage dialogue breakdowns in LLM-powered agents, emphasizing low-carbon operation. Our approach integrates two key strategies: (1) We fine-tune a compact 8B-parameter model, augmented with teacher-generated reasoning traces, which serves as an efficient real-time breakdown 'detector' and 'explainer'. This model demonstrates robust classification and calibration on English and Japanese dialogues, and generalizes well to the BETOLD dataset, improving accuracy by 7% over its baseline. (2) We systematically evaluate frontier LLMs using advanced prompting (few-shot, chain-of-thought, analogical reasoning) for high-fidelity breakdown assessment. These are integrated into an 'escalation' architecture where our efficient detector defers to larger models only when necessary, substantially reducing operational costs and energy consumption. Our fine-tuned model and prompting strategies establish new state-of-the-art results on dialogue breakdown detection benchmarks, outperforming specialized classifiers and significantly narrowing the performance gap to larger proprietary models. The proposed monitor-escalate pipeline reduces inference costs by 54%, offering a scalable, efficient, and more interpretable solution for robust conversational AI in high-impact domains. Code and models will be publicly released.

04 Aug 2021
Classification of human emotions can play an essential role in the design and
improvement of human-machine systems. While individual biological signals such
as Electrocardiogram (ECG) and Electrodermal Activity (EDA) have been widely
used for emotion recognition with machine learning methods, multimodal
approaches generally fuse extracted features or final classification/regression
results to boost performance. To enhance multimodal learning, we present a
novel attentive cross-modal connection to share information between
convolutional neural networks responsible for learning individual modalities.
Specifically, these connections improve emotion classification by sharing
intermediate representations among EDA and ECG and apply attention weights to
the shared information, thus learning more effective multimodal embeddings. We
perform experiments on the WESAD dataset to identify the best configuration of
the proposed method for emotion classification. Our experiments show that the
proposed approach is capable of learning strong multimodal representations and
outperforms a number of baselines methods.
07 Sep 2023
This paper demonstrates an equivalence between observation problems, control problems (with partial observation), and diagnosis problems of decentralized discrete-event systems, namely, the three classes of problems are Turing equivalent, as one class Turing reduces to another.
The equivalence allows decomposition of a control problem into a collection of simpler control sub\-/problems, which are each equivalent to an observation problem; and similarly allows converting a diagnosis problem to a formally simpler observation problem. Since observation problems in their most general formulation have been shown to be undecidable in previous work, the equivalence produced here demonstrates that control problems are also undecidable; whereas the undecidability of diagnosis problems is a known result.
02 Sep 2021
We propose the use of self-supervised learning for human activity recognition with smartphone accelerometer data. Our proposed solution consists of two steps. First, the representations of unlabeled input signals are learned by training a deep convolutional neural network to predict a segment of accelerometer values. Our model exploits a novel scheme to leverage past and present motion in x and y dimensions, as well as past values of the z axis to predict values in the z dimension. This cross-dimensional prediction approach results in effective pretext training with which our model learns to extract strong representations. Next, we freeze the convolution blocks and transfer the weights to our downstream network aimed at human activity recognition. For this task, we add a number of fully connected layers to the end of the frozen network and train the added layers with labeled accelerometer signals to learn to classify human activities. We evaluate the performance of our method on three publicly available human activity datasets: UCI HAR, MotionSense, and HAPT. The results show that our approach outperforms the existing methods and sets new state-of-the-art results.

11 Aug 2025
This study explores how human perceptions of a non-anthropomorphic robotic manipulator are shaped by two key dimensions of behaviour: arousal, defined as the robot's movement energy and expressiveness, and attention, defined as the robot's capacity to selectively orient toward and engage with a user. We introduce a novel control architecture that integrates a gaze-like attention engine with an arousal-modulated motion system to generate socially meaningful behaviours. In a user study, we find that robots exhibiting high attention -- actively directing their focus toward users -- are perceived as warmer and more competent, intentional, and lifelike. In contrast, high arousal -- characterized by fast, expansive, and energetic motions -- increases perceptions of discomfort and disturbance. Importantly, a combination of focused attention and moderate arousal yields the highest ratings of trust and sociability, while excessive arousal diminishes social engagement. These findings offer design insights for endowing non-humanoid robots with expressive, intuitive behaviours that support more natural human-robot interaction.

22 Aug 2025
Quadrupedal mobile robots can traverse a wider range of terrain types than their wheeled counterparts but do not perform the same on all terrain types. These robots are prone to undesirable behaviours like sinking and slipping on challenging terrains. To combat this issue, we propose a terrain classifier that provides information on terrain type that can be used in robotic systems to create a traversability map to plan safer paths for the robot to navigate. The work presented here is a terrain classifier developed for a Boston Dynamics Spot robot. Spot provides over 100 measured proprioceptive signals describing the motions of the robot and its four legs (e.g., foot penetration, forces, joint angles, etc.). The developed terrain classifier combines dimensionality reduction techniques to extract relevant information from the signals and then applies a classification technique to differentiate terrain based on traversability. In representative field testing, the resulting terrain classifier was able to identify three different terrain types with an accuracy of approximately 97%
21 Feb 2025
Reinforcement learning (RL) has gained traction for its success in solving
complex tasks for robotic applications. However, its deployment on physical
robots remains challenging due to safety risks and the comparatively high costs
of training. To avoid these problems, RL agents are often trained on
simulators, which introduces a new problem related to the gap between
simulation and reality. This paper presents an RL pipeline designed to help
reduce the reality gap and facilitate developing and deploying RL policies for
real-world robotic systems. The pipeline organizes the RL training process into
an initial step for system identification and three training stages: core
simulation training, high-fidelity simulation, and real-world deployment, each
adding levels of realism to reduce the sim-to-real gap. Each training stage
takes an input policy, improves it, and either passes the improved policy to
the next stage or loops it back for further improvement. This iterative process
continues until the policy achieves the desired performance. The pipeline's
effectiveness is shown through a case study with the Boston Dynamics Spot
mobile robot used in a surveillance application. The case study presents the
steps taken at each pipeline stage to obtain an RL agent to control the robot's
position and orientation.

26 Apr 2024

We investigate the unsupervised constituency parsing task, which organizes
words and phrases of a sentence into a hierarchical structure without using
linguistically annotated data. We observe that existing unsupervised parsers
capture differing aspects of parsing structures, which can be leveraged to
enhance unsupervised parsing performance. To this end, we propose a notion of
"tree averaging," based on which we further propose a novel ensemble method for
unsupervised parsing. To improve inference efficiency, we further distill the
ensemble knowledge into a student model; such an ensemble-then-distill process
is an effective approach to mitigate the over-smoothing problem existing in
common multi-teacher distilling methods. Experiments show that our method
surpasses all previous approaches, consistently demonstrating its effectiveness
and robustness across various runs, with different ensemble components, and
under domain-shift conditions.
There are no more papers matching your filters at the moment.
