13 Nov 2025
 University of Washington
University of Washington University of Amsterdam
University of Amsterdam University of Waterloo
University of Waterloo Northeastern University
Northeastern University Imperial College LondonUniversity of Zurich
Imperial College LondonUniversity of Zurich New York UniversityBAAIKorea University
New York UniversityBAAIKorea University University of Oxford
University of Oxford Stanford University
Stanford University Cornell University
Cornell University Peking University
Peking University McGill University
McGill University Allen Institute for AIAarhus University
Allen Institute for AIAarhus University University of Pennsylvania
University of Pennsylvania Hugging Face
Hugging Face Johns Hopkins UniversityMBZUAIJina AIHSE UniversitySapienza University of Rome
Johns Hopkins UniversityMBZUAIJina AIHSE UniversitySapienza University of Rome Princeton UniversityITMO UniversityINSA-LyonCentraleSupélec
Princeton UniversityITMO UniversityINSA-LyonCentraleSupélec Durham UniversityCISCO SystemsHong Kong UniversityFRC CSC RASKoç University
Durham UniversityCISCO SystemsHong Kong UniversityFRC CSC RASKoç University ServiceNowContextual AIComenius University BratislavaApart ResearchWikitHeritage Institute Of TechnologySalesforceThe London Institute of Banking and FinanceTano LabsNational Information Processing InstituteEskerArtefact Research CenterR. V. College of EngineeringEllamindOcciglotSaluteDevicesNirma UniversityRobert Koch InstituteWrocław UniversityIlluin TechnologyI.I.T Madras
ServiceNowContextual AIComenius University BratislavaApart ResearchWikitHeritage Institute Of TechnologySalesforceThe London Institute of Banking and FinanceTano LabsNational Information Processing InstituteEskerArtefact Research CenterR. V. College of EngineeringEllamindOcciglotSaluteDevicesNirma UniversityRobert Koch InstituteWrocław UniversityIlluin TechnologyI.I.T Madras
A collaborative effort produced MMTEB, the Massive Multilingual Text Embedding Benchmark, which offers over 500 quality-controlled evaluation tasks across more than 250 languages and 10 categories. The benchmark incorporates significant computational optimizations to enable accessible evaluation and reveals that instruction tuning enhances model performance, with smaller, broadly multilingual models often outperforming larger, English-centric models in low-resource contexts.

18 Mar 2025

Researchers from Koç University introduce Likra, a dual-headed model architecture that quantifies how large language models learn from negative examples, revealing that plausible but incorrect examples ("near-misses") produce faster learning curves and better accuracy improvements compared to traditional supervised fine-tuning with only positive examples.
23 Sep 2025

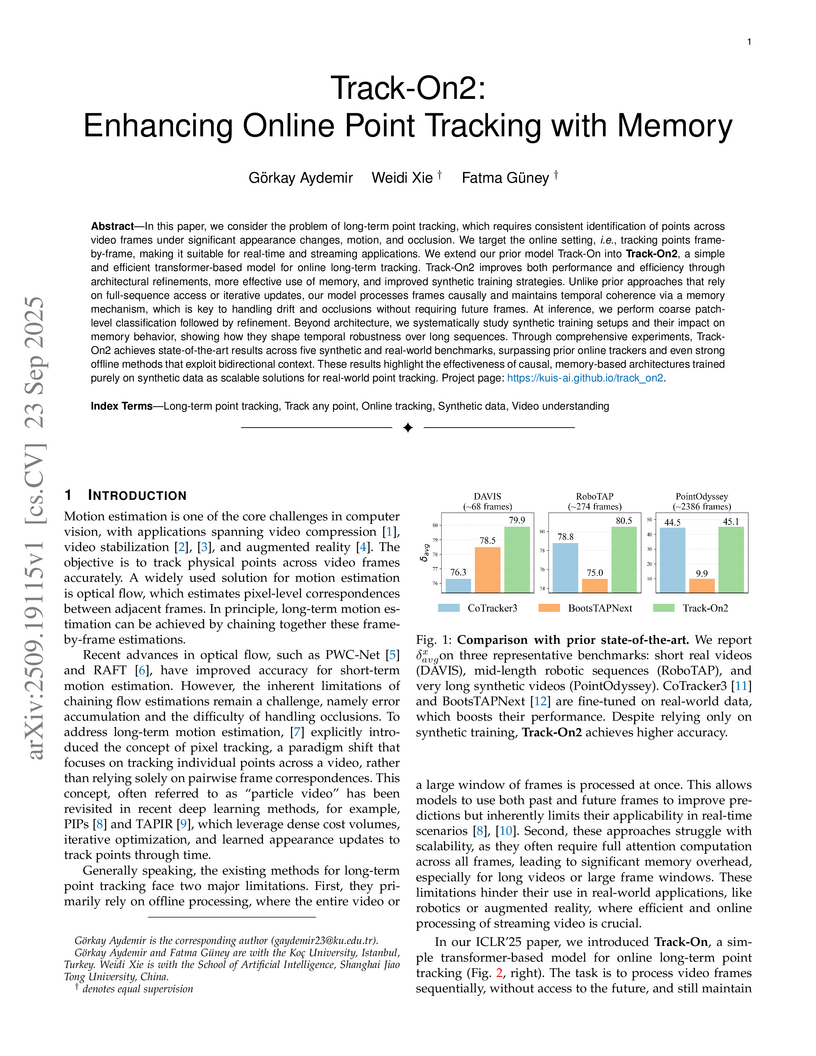
An online point tracking framework from Koç University and Shanghai Jiao Tong University, Track-On2, employs a memory-augmented transformer and synthetic training to achieve leading accuracy in long-term point tracking. It surpasses prior online and several offline methods, demonstrating real-time inference speeds exceeding 30 FPS for 256 points and maintaining a GPU memory usage below 1GB.

26 Nov 2025

Researchers from Koç University and Technical University of Munich systematically evaluated various model merging techniques on Large Language Models (LLMs), revealing that simpler weight interpolation methods like Task Arithmetic consistently improve performance, while more complex subspace-based approaches largely fail. The study found Task Arithmetic reliably achieved modest constructive interference, outperforming both base and individual fine-tuned models on average benchmarks.

23 Sep 2024
This survey paper from Koç University and collaborators maps the intricate landscape of GPU-centric communication, providing a comprehensive overview and taxonomy of hardware and software mechanisms that reduce CPU involvement in data transfers. It details the evolution from CPU-mediated to increasingly autonomous GPU communication, critical for scaling high-performance computing and machine learning applications.

25 Apr 2024

The Hippocrates framework introduces an open-source ecosystem for developing and evaluating medical Large Language Models. It presents two 7B parameter models, Hippo-λ and Hippo-μ, trained through a multi-stage process involving medical knowledge injection, instruction tuning, and preference learning, with Hippo-μ achieving 59.9% accuracy on the MedQA benchmark, competitively performing against much larger models.
03 Dec 2025

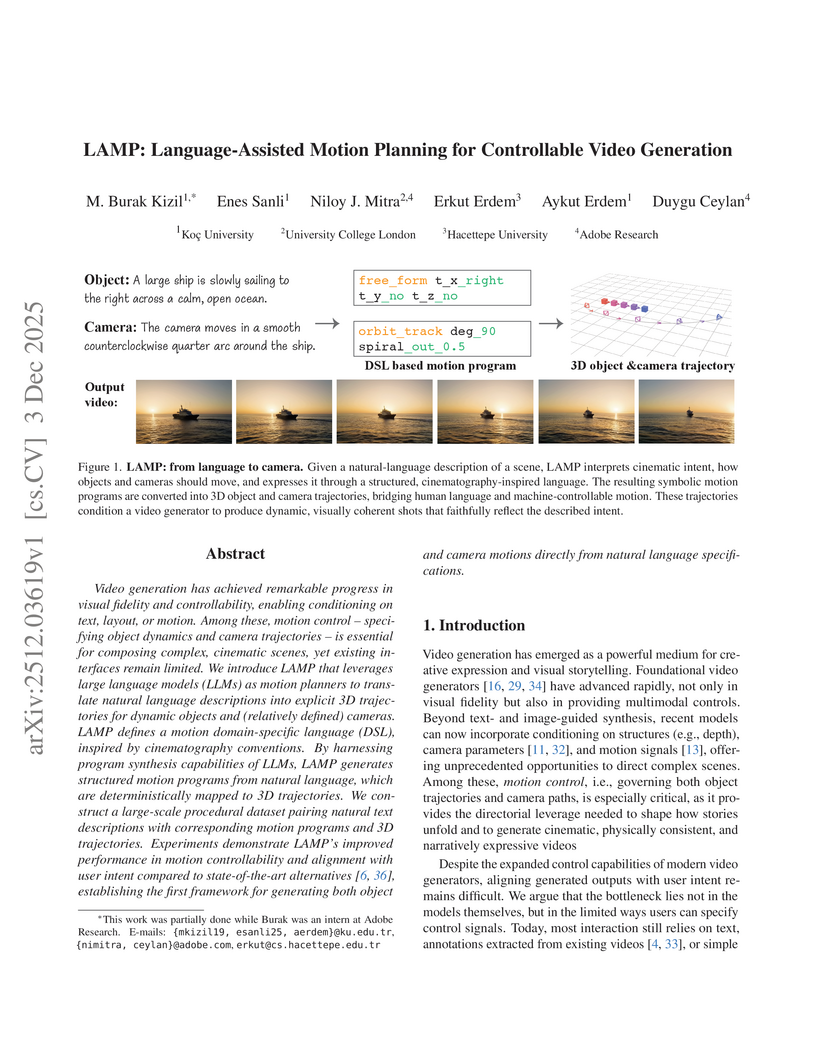
The LAMP framework employs Large Language Models to convert natural language instructions into precise 3D object and camera trajectories, which then guide a video diffusion model. This approach generates high-fidelity videos with coordinated motion by translating human directorial intent into a cinematography-inspired Domain-Specific Language, offering enhanced control for content creation.

01 May 2024
We are witnessing a revolution in conditional image synthesis with the recent success of large scale text-to-image generation methods. This success also opens up new opportunities in controlling the generation and editing process using multi-modal input. While spatial control using cues such as depth, sketch, and other images has attracted a lot of research, we argue that another equally effective modality is audio since sound and sight are two main components of human perception. Hence, we propose a method to enable audio-conditioning in large scale image diffusion models. Our method first maps features obtained from audio clips to tokens that can be injected into the diffusion model in a fashion similar to text tokens. We introduce additional audio-image cross attention layers which we finetune while freezing the weights of the original layers of the diffusion model. In addition to audio conditioned image generation, our method can also be utilized in conjuction with diffusion based editing methods to enable audio conditioned image editing. We demonstrate our method on a wide range of audio and image datasets. We perform extensive comparisons with recent methods and show favorable performance.

17 Nov 2025
This perspective explores various quantum models of consciousness from the viewpoint of quantum information science, offering potential ideas and insights. The models under consideration can be categorized into three distinct groups based on the level at which quantum mechanics might operate within the brain: those suggesting that consciousness arises from electron delocalization within microtubules inside neurons, those proposing it emerges from the electromagnetic field surrounding the entire neural network, and those positing it originates from the interactions between individual neurons governed by neurotransmitter molecules. Our focus is particularly on the Posner model of cognition, for which we provide preliminary calculations on the preservation of entanglement of phosphate molecules within the geometric structure of Posner clusters. These findings provide valuable insights into how quantum information theory can enhance our understanding of brain functions.
03 Jun 2025
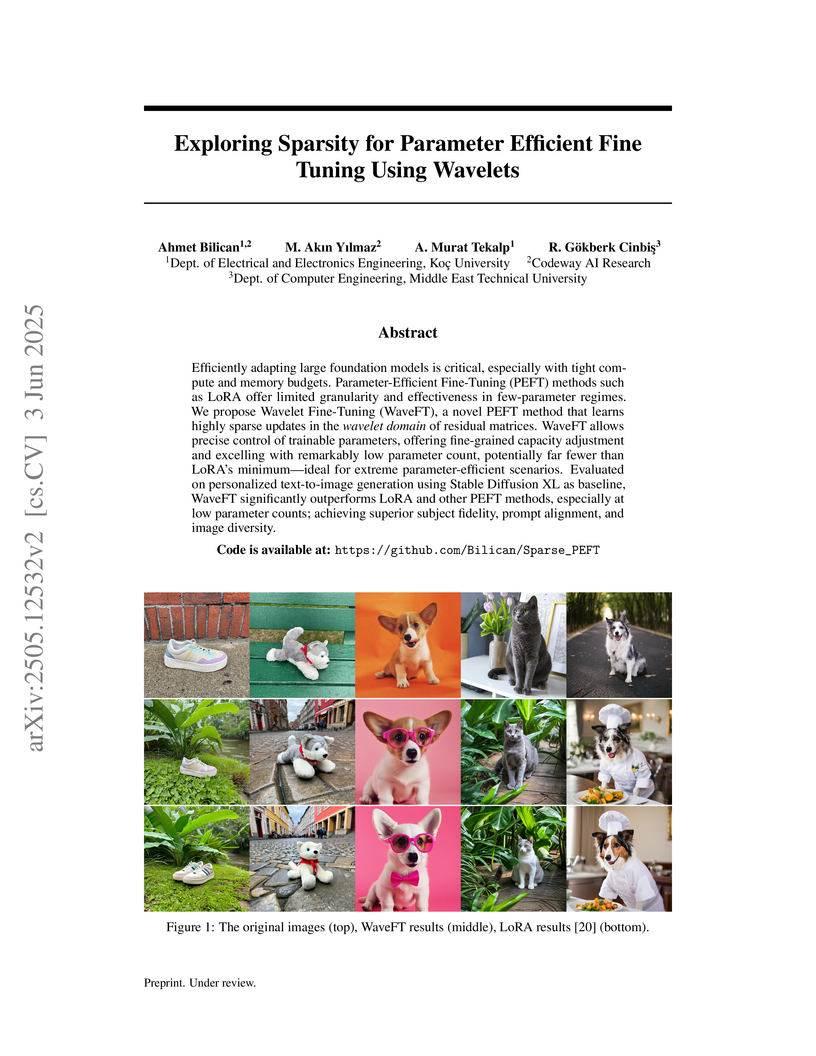
Efficiently adapting large foundation models is critical, especially with
tight compute and memory budgets. Parameter-Efficient Fine-Tuning (PEFT)
methods such as LoRA offer limited granularity and effectiveness in
few-parameter regimes. We propose Wavelet Fine-Tuning (WaveFT), a novel PEFT
method that learns highly sparse updates in the wavelet domain of residual
matrices. WaveFT allows precise control of trainable parameters, offering
fine-grained capacity adjustment and excelling with remarkably low parameter
count, potentially far fewer than LoRA's minimum, ideal for extreme
parameter-efficient scenarios. Evaluated on personalized text-to-image
generation using Stable Diffusion XL as baseline, WaveFT significantly
outperforms LoRA and other PEFT methods, especially at low parameter counts;
achieving superior subject fidelity, prompt alignment, and image diversity.

16 Sep 2024
Extracting a Bird's Eye View (BEV) representation from multiple camera images offers a cost-effective, scalable alternative to LIDAR-based solutions in autonomous driving. However, the performance of the existing BEV methods drops significantly under various corruptions such as brightness and weather changes or camera failures. To improve the robustness of BEV perception, we propose to adapt a large vision foundational model, DINOv2, to BEV estimation using Low Rank Adaptation (LoRA). Our approach builds on the strong representation space of DINOv2 by adapting it to the BEV task in a state-of-the-art framework, SimpleBEV. Our experiments show increased robustness of BEV perception under various corruptions, with increasing gains from scaling up the model and the input resolution. We also showcase the effectiveness of the adapted representations in terms of fewer learnable parameters and faster convergence during training.

24 Sep 2025
In this paper, we show that Simple Preference Optimization (SimPO) can be derived as Maximum Entropy Reinforcement Learning with length-normalized temperature, providing a theoretical foundation for this reference-free method. Motivated by SimPO's strong performance in offline preference optimization, we investigate whether Maximum Entropy RL can achieve similar results in online RLHF settings. Our experiments find that Maximum Entropy RL consistently exhibits overoptimization and unstable KL dynamics, even at very low learning rates. Unlike KL-constrained methods that maintain stable training, entropy regularization fails to prevent reward hacking and appears to correlate with overoptimization. Lastly, we discuss possible explanations for why SimPO succeeds in offline settings while Maximum Entropy RL struggles in online scenarios. Our findings suggest that reference-free approaches may face distinct challenges when applied to online or offline preference learning.
26 Jun 2025
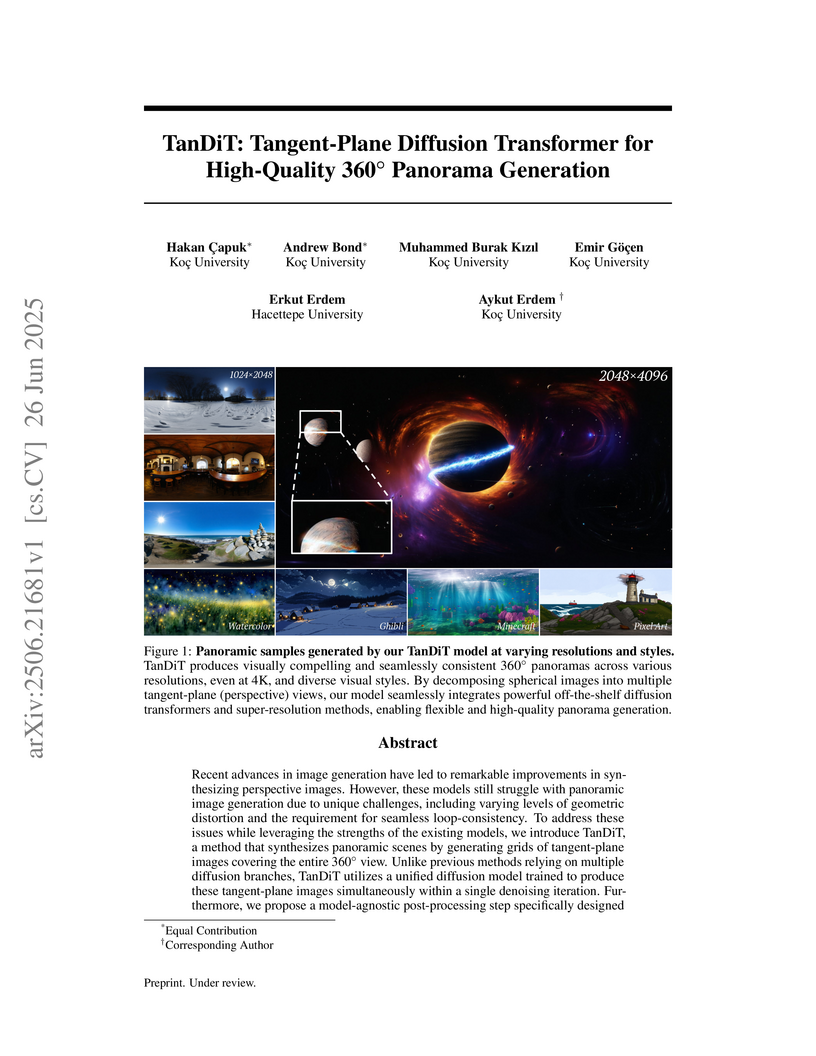
TanDiT generates high-quality 360° panoramas by decomposing scenes into structured tangent-plane views for generation by a Diffusion Transformer, followed by an equirectangular-conditioned refinement step to ensure global coherence. The method demonstrates improved consistency across the entire panoramic field of view and achieves strong user preference over prior approaches.

21 Aug 2025
Backdoor attacks pose a significant threat to the integrity of text classification models used in natural language processing. While several dirty-label attacks that achieve high attack success rates (ASR) have been proposed, clean-label attacks are inherently more difficult. In this paper, we propose three sample selection strategies to improve attack effectiveness in clean-label scenarios: Minimum, Above50, and Below50. Our strategies identify those samples which the model predicts incorrectly or with low confidence, and by injecting backdoor triggers into such samples, we aim to induce a stronger association between the trigger patterns and the attacker-desired target label. We apply our methods to clean-label variants of four canonical backdoor attacks (InsertSent, WordInj, StyleBkd, SynBkd) and evaluate them on three datasets (IMDB, SST2, HateSpeech) and four model types (LSTM, BERT, DistilBERT, RoBERTa). Results show that the proposed strategies, particularly the Minimum strategy, significantly improve the ASR over random sample selection with little or no degradation in the model's clean accuracy. Furthermore, clean-label attacks enhanced by our strategies outperform BITE, a state of the art clean-label attack method, in many configurations.
29 Aug 2025
Constructing high-definition (HD) maps from sensory input requires accurately mapping the road elements in image space to the Bird's Eye View (BEV) space. The precision of this mapping directly impacts the quality of the final vectorized HD map. Existing HD mapping approaches outsource the projection to standard mapping techniques, such as attention-based ones. However, these methods struggle with accuracy due to generalization problems, often hallucinating non-existent road elements. Our key idea is to start with a geometric mapping based on camera parameters and adapt it to the scene to extract relevant map information from camera images. To implement this, we propose a novel probabilistic projection mechanism with confidence scores to (i) refine the mapping to better align with the scene and (ii) filter out irrelevant elements that should not influence HD map generation. In addition, we improve temporal processing by using confidence scores to selectively accumulate reliable information over time. Experiments on new splits of the nuScenes and Argoverse2 datasets demonstrate improved performance over state-of-the-art approaches, indicating better generalization. The improvements are particularly pronounced on nuScenes and in the challenging long perception range. Our code and model checkpoints are available at this https URL .

14 Sep 2025
To reduce the computational and memory overhead of Large Language Models, various approaches have been proposed. These include a) Mixture of Experts (MoEs), where token routing affects compute balance; b) gradual pruning of model parameters; c) dynamically freezing layers; d) dynamic sparse attention mechanisms; e) early exit of tokens as they pass through model layers; and f) Mixture of Depths (MoDs), where tokens bypass certain blocks. While these approaches are effective in reducing overall computation, they often introduce significant workload imbalance across workers. In many cases, this imbalance is severe enough to render the techniques impractical for large-scale distributed training, limiting their applicability to toy models due to poor efficiency.
We propose an autonomous dynamic load balancing solution, DynMo, which provably achieves maximum reduction in workload imbalance and adaptively equalizes compute loads across workers in pipeline-parallel training. In addition, DynMo dynamically consolidates computation onto fewer workers without sacrificing training throughput, allowing idle workers to be released back to the job manager. DynMo supports both single-node multi-GPU systems and multi-node GPU clusters, and can be used in practical deployment. Compared to static distributed training solutions such as Megatron-LM and DeepSpeed, DynMo accelerates the end-to-end training of dynamic GPT models by up to 1.23x for MoEs, 3.18x for parameter pruning, 2.23x for layer freezing, 4.02x for sparse attention, 4.52x for early exit, and 1.17x for MoDs.
12 Jul 2025
Point tracking aims to identify the same physical point across video frames and serves as a geometry-aware representation of motion. This representation supports a wide range of applications, from robotics to augmented reality, by enabling accurate modeling of dynamic environments. Most existing long-term tracking approaches operate in an offline setting, where future frames are available to refine predictions and recover from occlusions. However, real-world scenarios often demand online predictions: the model must operate causally, using only current and past frames. This constraint is critical in streaming video and embodied AI, where decisions must be made immediately based on past observations. Under such constraints, viewpoint invariance becomes essential. Visual foundation models, trained on diverse large-scale datasets, offer the potential for robust geometric representations. While they lack temporal reasoning on their own, they can be integrated into tracking pipelines to enrich spatial features. In this thesis, we address the problem of long-term point tracking in an online setting, where frames are processed sequentially without access to future information or sliding windows. We begin by evaluating the suitability of visual foundation models for this task and find that they can serve as useful initializations and be integrated into tracking pipelines. However, to enable long-term tracking in an online setting, a dedicated design is still required. In particular, maintaining coherence over time in this causal regime requires memory to propagate appearance and context across frames. To address this, we introduce Track-On, a transformer-based model that treats each tracked point as a query and processes video frames one at a time. Track-On sets a new state of the art across seven public benchmarks, demonstrating the feasibility of long-term tracking without future access.
17 May 2022
The database creation utilized automated text processing tools that detect if a news article contains a protest event, locate protest information within the article, and extract pieces of information regarding the detected protest events. The basis of training and testing the automated tools is the GLOCON Gold Standard Corpus (GSC), which contains news articles from multiple sources from each focus country. The articles in the GSC were manually coded by skilled annotators in both classification and extraction tasks with the utmost accuracy and consistency that automated tool development demands. In order to assure these, the annotation manuals in this document lay out the rules according to which annotators code the news articles. Annotators refer to the manuals at all times for all annotation tasks and apply the rules that they contain. The content of the annotation manual is built on the general principles and standards of linguistic annotation laid out in other prominent annotation manuals such as ACE, CAMEO, and TimeML. These principles, however, have been adapted or rather modified heavily to accommodate the social scientific concepts and variables employed in the EMW project. The manual has been molded throughout a long trial and error process that accompanied the annotation of the GSC. It owes much of its current shape to the meticulous work and invaluable feedback provided by highly specialized teams of annotators, whose diligence and expertise greatly increased the quality of the corpus.
11 Dec 2024
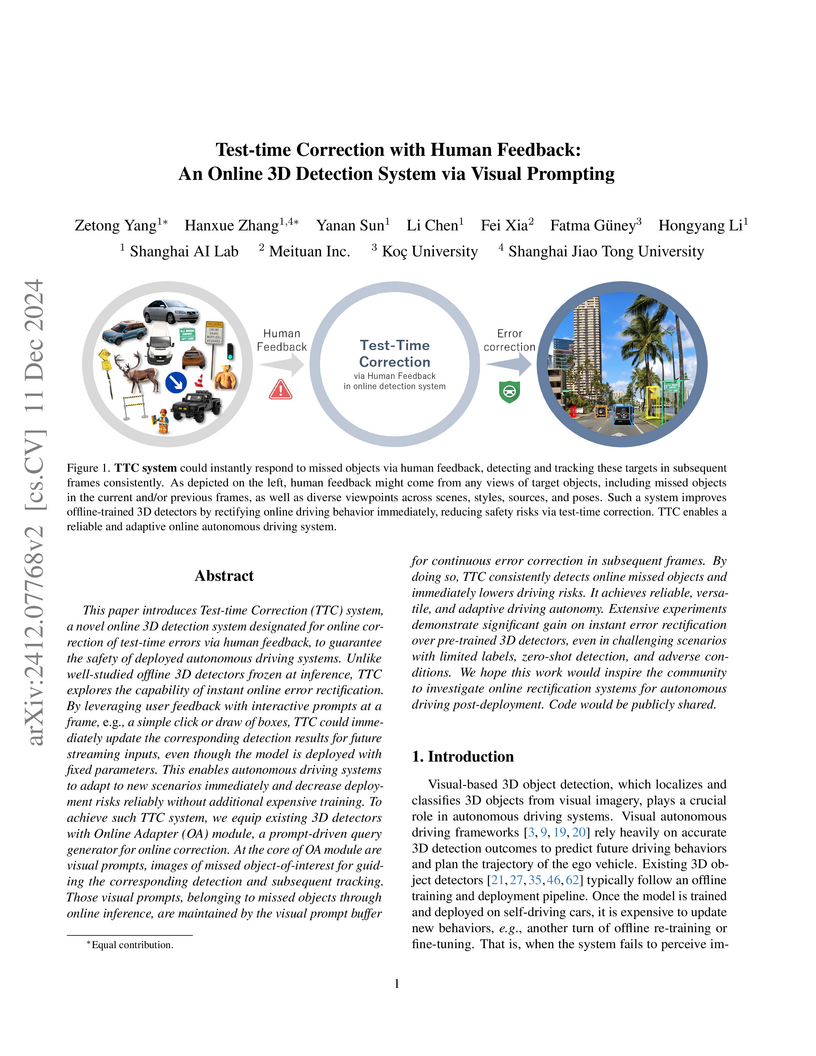
This paper introduces Test-time Correction (TTC) system, a novel online 3D
detection system designated for online correction of test-time errors via human
feedback, to guarantee the safety of deployed autonomous driving systems.
Unlike well-studied offline 3D detectors frozen at inference, TTC explores the
capability of instant online error rectification. By leveraging user feedback
with interactive prompts at a frame, e.g., a simple click or draw of boxes, TTC
could immediately update the corresponding detection results for future
streaming inputs, even though the model is deployed with fixed parameters. This
enables autonomous driving systems to adapt to new scenarios immediately and
decrease deployment risks reliably without additional expensive training. To
achieve such TTC system, we equip existing 3D detectors with Online Adapter
(OA) module, a prompt-driven query generator for online correction. At the core
of OA module are visual prompts, images of missed object-of-interest for
guiding the corresponding detection and subsequent tracking. Those visual
prompts, belonging to missed objects through online inference, are maintained
by the visual prompt buffer for continuous error correction in subsequent
frames. By doing so, TTC consistently detects online missed objects and
immediately lowers driving risks. It achieves reliable, versatile, and adaptive
driving autonomy. Extensive experiments demonstrate significant gain on instant
error rectification over pre-trained 3D detectors, even in challenging
scenarios with limited labels, zero-shot detection, and adverse conditions. We
hope this work would inspire the community to investigate online rectification
systems for autonomous driving post-deployment. Code would be publicly shared.
24 Aug 2024

The proliferation of Low Earth Orbit (LEO) satellite constellations has intensified the challenge of space debris management. This paper introduces DebriSense-THz, a novel Terahertz-Enabled Debris Sensing system for LEO satellites that leverages Integrated Sensing and Communications (ISAC) technology. We present a comprehensive THz channel model for LEO environments, incorporating debris interactions such as reflection, scattering, and diffraction. The DebriSense-THz architecture employs machine learning techniques for debris detection and classification using Channel State Information (CSI) features. Performance evaluation across different frequencies (30 GHz-5 THz), MIMO configurations, debris densities, and SNR levels demonstrates significant improvements in debris detection and classification accuracy (95-99% at 5 THz compared to 62-81% at 30 GHz). Higher SNR configurations enhance sensing performance, particularly at higher frequencies. The system shows robust performance across various debris densities and MIMO size in the THz range, with a noted trade-off between communication reliability and sensing accuracy at lower frequencies. DebriSense-THz represents a significant advance in space situational awareness, paving the way for more effective debris mitigation strategies in increasingly congested LEO environments.
There are no more papers matching your filters at the moment.
