30 Jan 2025
 ETH Zurich
ETH Zurich University of Toronto
University of Toronto University of Illinois at Urbana-Champaign
University of Illinois at Urbana-Champaign Chinese Academy of Sciences
Chinese Academy of Sciences Carnegie Mellon University
Carnegie Mellon University Université de Montréal
Université de Montréal New York University
New York University University of Oxford
University of Oxford Stanford University
Stanford University Mila - Quebec AI Institute
Mila - Quebec AI Institute Seoul National University
Seoul National University Princeton University
Princeton University HKUSTIndian Institute of Technology MadrasThe University of New South WalesOregon State UniversityConcordia AIUniversity of São PauloGerman Research Center for Artificial IntelligenceSony Group CorporationUniversity of LoughboroughBrookings InstitutionLobsterTelELLIS AlicanteInfocomm Media Development AuthorityUniversidad Técnica Federico Santa Maria
HKUSTIndian Institute of Technology MadrasThe University of New South WalesOregon State UniversityConcordia AIUniversity of São PauloGerman Research Center for Artificial IntelligenceSony Group CorporationUniversity of LoughboroughBrookings InstitutionLobsterTelELLIS AlicanteInfocomm Media Development AuthorityUniversidad Técnica Federico Santa Maria
A landmark international scientific assessment, led by Prof. Yoshua Bengio and 96 global AI experts, provides the first comprehensive evidence-based framework for understanding advanced AI safety risks and mitigation strategies, establishing crucial scientific foundations for international policy while highlighting urgent challenges requiring proactive governance.

15 Oct 2025
Chat assistants increasingly integrate web search functionality, enabling them to retrieve and cite external sources. While this promises more reliable answers, it also raises the risk of amplifying misinformation from low-credibility sources. In this paper, we introduce a novel methodology for evaluating assistants' web search behavior, focusing on source credibility and the groundedness of responses with respect to cited sources. Using 100 claims across five misinformation-prone topics, we assess GPT-4o, GPT-5, Perplexity, and Qwen Chat. Our findings reveal differences between the assistants, with Perplexity achieving the highest source credibility, whereas GPT-4o exhibits elevated citation of non-credibility sources on sensitive topics. This work provides the first systematic comparison of commonly used chat assistants for fact-checking behavior, offering a foundation for evaluating AI systems in high-stakes information environments.
28 Nov 2025

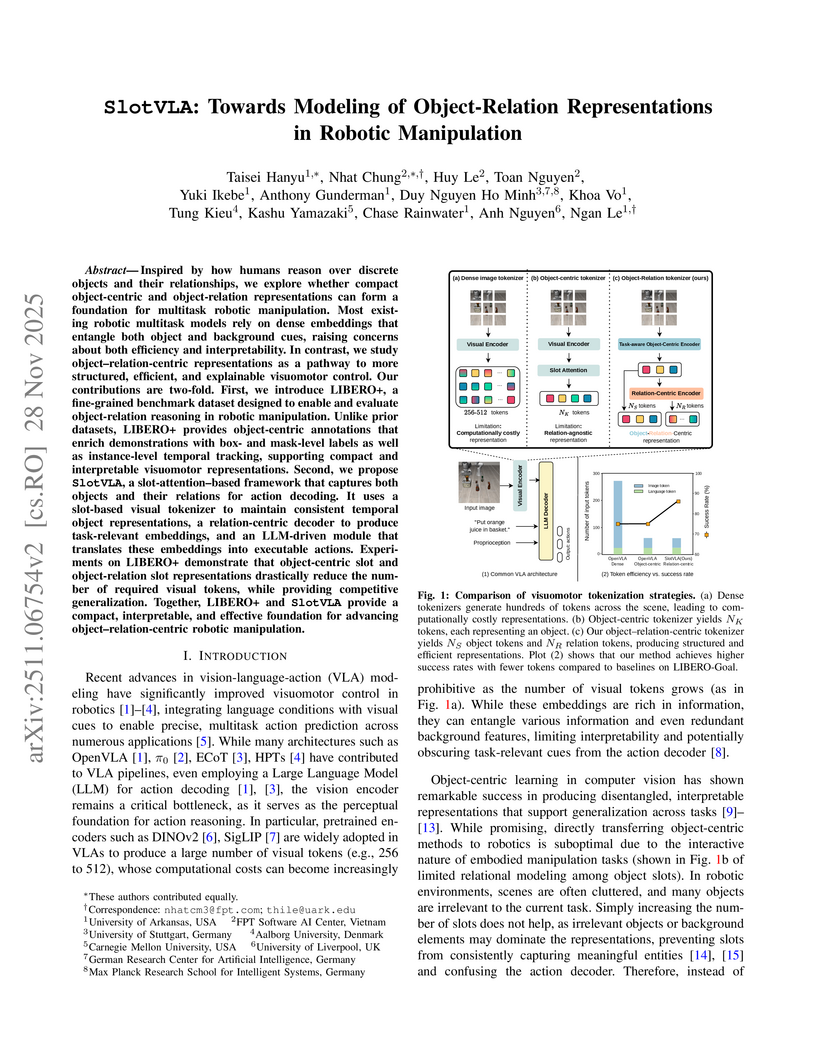
Inspired by how humans reason over discrete objects and their relationships, we explore whether compact object-centric and object-relation representations can form a foundation for multitask robotic manipulation. Most existing robotic multitask models rely on dense embeddings that entangle both object and background cues, raising concerns about both efficiency and interpretability. In contrast, we study object-relation-centric representations as a pathway to more structured, efficient, and explainable visuomotor control. Our contributions are two-fold. First, we introduce LIBERO+, a fine-grained benchmark dataset designed to enable and evaluate object-relation reasoning in robotic manipulation. Unlike prior datasets, LIBERO+ provides object-centric annotations that enrich demonstrations with box- and mask-level labels as well as instance-level temporal tracking, supporting compact and interpretable visuomotor representations. Second, we propose SlotVLA, a slot-attention-based framework that captures both objects and their relations for action decoding. It uses a slot-based visual tokenizer to maintain consistent temporal object representations, a relation-centric decoder to produce task-relevant embeddings, and an LLM-driven module that translates these embeddings into executable actions. Experiments on LIBERO+ demonstrate that object-centric slot and object-relation slot representations drastically reduce the number of required visual tokens, while providing competitive generalization. Together, LIBERO+ and SlotVLA provide a compact, interpretable, and effective foundation for advancing object-relation-centric robotic manipulation.
15 Sep 2025
We present Multipole Semantic Attention (MuSe), an efficient approximation of softmax attention that combines semantic clustering with multipole expansions from computational physics. Our method addresses the quadratic computational complexity of transformers in the context length by clustering queries and keys separately in their learned representation spaces, enabling a hierarchical two-stage attention mechanism. Unlike prior clustering approaches that group only keys or use unified clustering, we maintain separate clusterings that respect attention's asymmetric treatment of these spaces. We augment centroid-based (monopole) approximations with dipole corrections that capture directional variance within clusters, preserving richer information during training. The method operates as a drop-in replacement for standard attention, requiring only hyperparameter specification without architectural modifications. Our approach achieves complexity for acausal attention with clusters and for causal attention. On isolated attention layers, we demonstrate speedup over CUDNN Flash Attention at 8k context length, with relative squared errors below 20%. For causal attention, we develop a hierarchical block decomposition that combines exact local computation with efficient long-range approximation. In end-to-end pretraining of a 30M parameter model on book-length texts with 16k context, we achieve 12.2% runtime reduction with only 0.36% loss degradation, establishing the viability of multipole approximations for efficient transformer pretraining.
09 Apr 2025
ETH Zurich University of WashingtonUniversity of Illinois at Urbana-ChampaignCSIROChinese Academy of SciencesCarnegie Mellon UniversityUniversité de MontréalUniversity of OxfordStanford UniversityMila - Quebec AI Institute
University of WashingtonUniversity of Illinois at Urbana-ChampaignCSIROChinese Academy of SciencesCarnegie Mellon UniversityUniversité de MontréalUniversity of OxfordStanford UniversityMila - Quebec AI Institute University of SouthamptonSeoul National UniversityInstitute for Advanced Study
University of SouthamptonSeoul National UniversityInstitute for Advanced Study Inria
Inria Duke UniversityPrinceton UniversityHKUSTIndian Institute of Technology MadrasAlan Turing InstituteOregon State UniversityConcordia AIPontificia Universidad Católica de ChileUniversity of YorkUniversity of São PauloGerman Research Center for Artificial IntelligenceUniversity of LoughboroughMozillaUniversity of Chieti-PescaraELLIS AlicanteThe Brookings InstitutionFederal University of PernambucoScience Foundation IrelandThe Commonwealth Scientific and Industrial Research OrganisationSony GroupThe National Institute for Research in Digital Science and TechnologyIsrael Innovation AuthorityHumane IntelligenceFederico Santa María Technical University
Duke UniversityPrinceton UniversityHKUSTIndian Institute of Technology MadrasAlan Turing InstituteOregon State UniversityConcordia AIPontificia Universidad Católica de ChileUniversity of YorkUniversity of São PauloGerman Research Center for Artificial IntelligenceUniversity of LoughboroughMozillaUniversity of Chieti-PescaraELLIS AlicanteThe Brookings InstitutionFederal University of PernambucoScience Foundation IrelandThe Commonwealth Scientific and Industrial Research OrganisationSony GroupThe National Institute for Research in Digital Science and TechnologyIsrael Innovation AuthorityHumane IntelligenceFederico Santa María Technical UniversityThis is the interim publication of the first International Scientific Report
on the Safety of Advanced AI. The report synthesises the scientific
understanding of general-purpose AI -- AI that can perform a wide variety of
tasks -- with a focus on understanding and managing its risks. A diverse group
of 75 AI experts contributed to this report, including an international Expert
Advisory Panel nominated by 30 countries, the EU, and the UN. Led by the Chair,
these independent experts collectively had full discretion over the report's
content.
The final report is available at arXiv:2501.17805
24 Aug 2023
Researchers at TU Darmstadt investigated whether Large Language Models genuinely reason about causality or merely recognize and recite patterns from their training data, concluding LLMs are 'causal parrots' that exhibit inconsistent performance and high sensitivity to query wording on causal tasks.

15 Sep 2025
We present a learnable physics simulator that provides accurate motion and force-torque prediction of robot end effectors in contact-rich manipulation. The proposed model extends the state-of-the-art GNN-based simulator (FIGNet) with novel node and edge types, enabling action-conditional predictions for control and state estimation tasks. In simulation, the MPC agent using our model matches the performance of the same controller with the ground truth dynamics model in a challenging peg-in-hole task, while in the real-world experiment, our model achieves a 50% improvement in motion prediction accuracy and 3 increase in force-torque prediction precision over the baseline physics simulator. Source code and data are publicly available.

18 Nov 2025
False information poses a significant global challenge, and manually verifying claims is a time-consuming and resource-intensive process. In this research paper, we experiment with different approaches to investigate the effectiveness of large language models (LLMs) in classifying factual claims by their veracity and generating justifications in English and Telugu. The key contributions of this work include the creation of a bilingual English-Telugu dataset and the benchmarking of different veracity classification approaches based on LLMs.

21 Oct 2025
Hallucination, where models generate fluent text unsupported by visual evidence, remains a major flaw in vision-language models and is particularly critical in sign language translation (SLT). In SLT, meaning depends on precise grounding in video, and gloss-free models are especially vulnerable because they map continuous signer movements directly into natural language without intermediate gloss supervision that serves as alignment. We argue that hallucinations arise when models rely on language priors rather than visual input. To capture this, we propose a token-level reliability measure that quantifies how much the decoder uses visual information. Our method combines feature-based sensitivity, which measures internal changes when video is masked, with counterfactual signals, which capture probability differences between clean and altered video inputs. These signals are aggregated into a sentence-level reliability score, providing a compact and interpretable measure of visual grounding. We evaluate the proposed measure on two SLT benchmarks (PHOENIX-2014T and CSL-Daily) with both gloss-based and gloss-free models. Our results show that reliability predicts hallucination rates, generalizes across datasets and architectures, and decreases under visual degradations. Beyond these quantitative trends, we also find that reliability distinguishes grounded tokens from guessed ones, allowing risk estimation without references; when combined with text-based signals (confidence, perplexity, or entropy), it further improves hallucination risk estimation. Qualitative analysis highlights why gloss-free models are more susceptible to hallucinations. Taken together, our findings establish reliability as a practical and reusable tool for diagnosing hallucinations in SLT, and lay the groundwork for more robust hallucination detection in multimodal generation.

15 Sep 2025
Researchers from the Federal Office for Information Security (BSI), German Research Center for Artificial Intelligence (DFKI), and University of Freiburg introduced a security perspective on human oversight of AI, conceptualizing it as a novel attack surface. They detailed 11 categories of attack vectors that can undermine effective human oversight and proposed seven corresponding hardening strategies derived from cybersecurity practices.

08 Dec 2025

High-fidelity fluid simulations are central to understanding transport phenomena, yet resolving large or geometrically complex systems remains computationally prohibitive with existing methods. Here we introduce a tensor-network formulation of the lattice Boltzmann method based on matrix product states (MPS), commonly known as a quantum-inspired approach, enabling compressed representations of structured flow fields with inherent error control. We demonstrate the generality of the method on flows through structured media and complex vascular geometries, establishing for the first time that tensor-network techniques can efficiently resolve fluid dynamics in complex, irregular domains. We show that in the presence of translational or approximate symmetries of the geometry, fluid states exhibit low effective complexity in MPS form, yielding compression ratios exceeding two orders of magnitude while preserving physical structure and dynamical fidelity. This reduction enables systematic numerical exploration of regimes that were previously intractable. Our results position tensor networks as a scalable paradigm for continuum mechanics.

09 Nov 2025
Despite recent advances in single-object front-facing inpainting using NeRF and 3D Gaussian Splatting (3DGS), inpainting in complex 360° scenes remains largely underexplored. This is primarily due to three key challenges: (i) identifying target objects in the 3D field of 360° environments, (ii) dealing with severe occlusions in multi-object scenes, which makes it hard to define regions to inpaint, and (iii) maintaining consistent and high-quality appearance across views effectively. To tackle these challenges, we propose Inpaint360GS, a flexible 360° editing framework based on 3DGS that supports multi-object removal and high-fidelity inpainting in 3D space. By distilling 2D segmentation into 3D and leveraging virtual camera views for contextual guidance, our method enables accurate object-level editing and consistent scene completion. We further introduce a new dataset tailored for 360° inpainting, addressing the lack of ground truth object-free scenes. Experiments demonstrate that Inpaint360GS outperforms existing baselines and achieves state-of-the-art performance. Project page: this https URL

28 Sep 2021
Robots are becoming everyday devices, increasing their interaction with humans. To make human-machine interaction more natural, cognitive features like Visual Voice Activity Detection (VVAD), which can detect whether a person is speaking or not, given visual input of a camera, need to be implemented. Neural networks are state of the art for tasks in Image Processing, Time Series Prediction, Natural Language Processing and other domains. Those Networks require large quantities of labeled data. Currently there are not many datasets for the task of VVAD. In this work we created a large scale dataset called the VVAD-LRS3 dataset, derived by automatic annotations from the LRS3 dataset. The VVAD-LRS3 dataset contains over 44K samples, over three times the next competitive dataset (WildVVAD). We evaluate different baselines on four kinds of features: facial and lip images, and facial and lip landmark features. With a Convolutional Neural Network Long Short Term Memory (CNN LSTM) on facial images an accuracy of 92% was reached on the test set. A study with humans showed that they reach an accuracy of 87.93% on the test set.
22 Aug 2025

Recent advancements in video generation have substantially improved visual quality and temporal coherence, making these models increasingly appealing for applications such as autonomous driving, particularly in the context of driving simulation and so-called "world models". In this work, we investigate the effects of existing fine-tuning video generation approaches on structured driving datasets and uncover a potential trade-off: although visual fidelity improves, spatial accuracy in modeling dynamic elements may degrade. We attribute this degradation to a shift in the alignment between visual quality and dynamic understanding objectives. In datasets with diverse scene structures within temporal space, where objects or perspective shift in varied ways, these objectives tend to highly correlated. However, the very regular and repetitive nature of driving scenes allows visual quality to improve by modeling dominant scene motion patterns, without necessarily preserving fine-grained dynamic behavior. As a result, fine-tuning encourages the model to prioritize surface-level realism over dynamic accuracy. To further examine this phenomenon, we show that simple continual learning strategies, such as replay from diverse domains, can offer a balanced alternative by preserving spatial accuracy while maintaining strong visual quality.

18 Nov 2023


Obtaining large pre-trained models that can be fine-tuned to new tasks with limited annotated samples has remained an open challenge for medical imaging data. While pre-trained deep networks on ImageNet and vision-language foundation models trained on web-scale data are prevailing approaches, their effectiveness on medical tasks is limited due to the significant domain shift between natural and medical images. To bridge this gap, we introduce LVM-Med, the first family of deep networks trained on large-scale medical datasets. We have collected approximately 1.3 million medical images from 55 publicly available datasets, covering a large number of organs and modalities such as CT, MRI, X-ray, and Ultrasound. We benchmark several state-of-the-art self-supervised algorithms on this dataset and propose a novel self-supervised contrastive learning algorithm using a graph-matching formulation. The proposed approach makes three contributions: (i) it integrates prior pair-wise image similarity metrics based on local and global information; (ii) it captures the structural constraints of feature embeddings through a loss function constructed via a combinatorial graph-matching objective; and (iii) it can be trained efficiently end-to-end using modern gradient-estimation techniques for black-box solvers. We thoroughly evaluate the proposed LVM-Med on 15 downstream medical tasks ranging from segmentation and classification to object detection, and both for the in and out-of-distribution settings. LVM-Med empirically outperforms a number of state-of-the-art supervised, self-supervised, and foundation models. For challenging tasks such as Brain Tumor Classification or Diabetic Retinopathy Grading, LVM-Med improves previous vision-language models trained on 1 billion masks by 6-7% while using only a ResNet-50.
03 Apr 2025
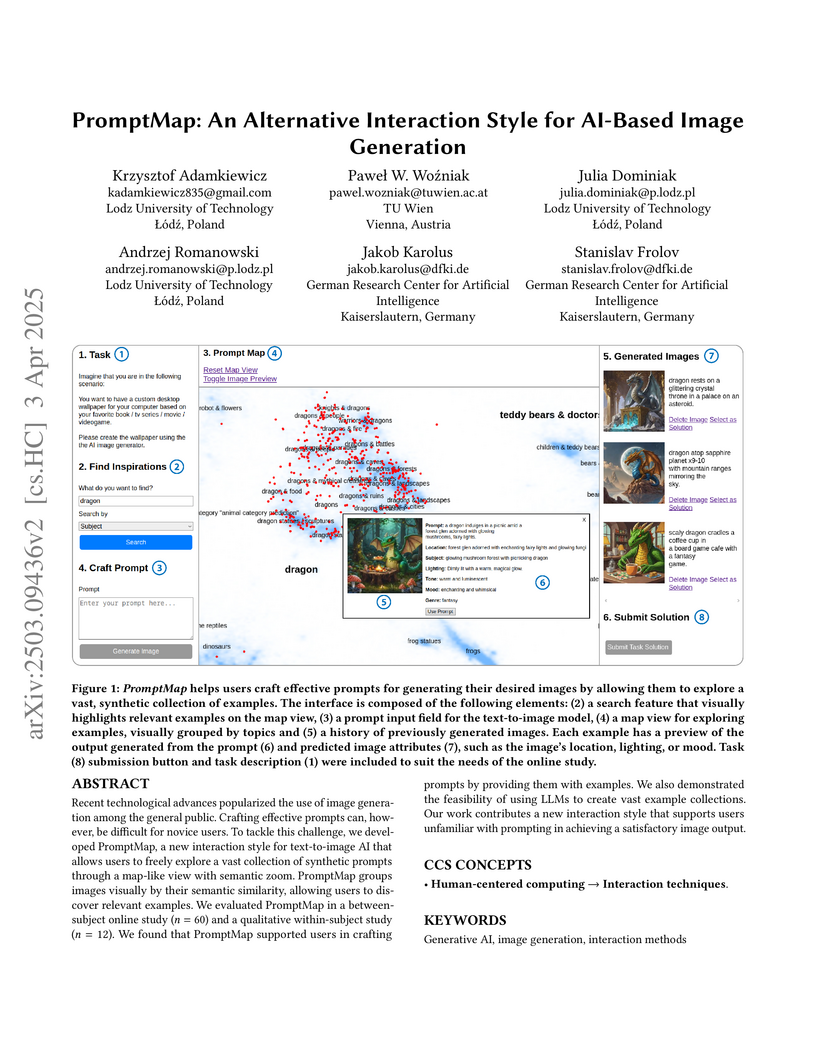
Recent technological advances popularized the use of image generation among
the general public. Crafting effective prompts can, however, be difficult for
novice users. To tackle this challenge, we developed PromptMap, a new
interaction style for text-to-image AI that allows users to freely explore a
vast collection of synthetic prompts through a map-like view with semantic
zoom. PromptMap groups images visually by their semantic similarity, allowing
users to discover relevant examples. We evaluated PromptMap in a
between-subject online study () and a qualitative within-subject study
(). We found that PromptMap supported users in crafting prompts by
providing them with examples. We also demonstrated the feasibility of using
LLMs to create vast example collections. Our work contributes a new interaction
style that supports users unfamiliar with prompting in achieving a satisfactory
image output.

22 Oct 2025
State-of-the-art sign language translation (SLT) systems facilitate the learning process through gloss annotations, either in an end2end manner or by involving an intermediate step. Unfortunately, gloss labelled sign language data is usually not available at scale and, when available, gloss annotations widely differ from dataset to dataset. We present a novel approach using sentence embeddings of the target sentences at training time that take the role of glosses. The new kind of supervision does not need any manual annotation but it is learned on raw textual data. As our approach easily facilitates multilinguality, we evaluate it on datasets covering German (PHOENIX-2014T) and American (How2Sign) sign languages and experiment with mono- and multilingual sentence embeddings and translation systems. Our approach significantly outperforms other gloss-free approaches, setting the new state-of-the-art for data sets where glosses are not available and when no additional SLT datasets are used for pretraining, diminishing the gap between gloss-free and gloss-dependent systems.

27 Nov 2024
Semantic mapping is a key component of robots operating in and interacting with objects in structured environments. Traditionally, geometric and knowledge representations within a semantic map have only been loosely integrated. However, recent advances in deep learning now allow full integration of prior knowledge, represented as knowledge graphs or language concepts, into sensor data processing and semantic mapping pipelines. Semantic scene graphs and language models enable modern semantic mapping approaches to incorporate graph-based prior knowledge or to leverage the rich information in human language both during and after the mapping process. This has sparked substantial advances in semantic mapping, leading to previously impossible novel applications. This survey reviews these recent developments comprehensively, with a focus on online integration of knowledge into semantic mapping. We specifically focus on methods using semantic scene graphs for integrating symbolic prior knowledge and language models for respective capture of implicit common-sense knowledge and natural language concepts

25 Aug 2025
Early diagnosis of plant diseases is critical for global food safety, yet most AI solutions lack the generalization required for real-world agricultural diversity. These models are typically constrained to specific species, failing to perform accurately across the broad spectrum of cultivated plants. To address this gap, we first introduce the FloraSyntropy Archive, a large-scale dataset of 178,922 images across 35 plant species, annotated with 97 distinct disease classes. We establish a benchmark by evaluating numerous existing models on this archive, revealing a significant performance gap. We then propose FloraSyntropy-Net, a novel federated learning framework (FL) that integrates a Memetic Algorithm (MAO) for optimal base model selection (DenseNet201), a novel Deep Block for enhanced feature representation, and a client-cloning strategy for scalable, privacy-preserving training. FloraSyntropy-Net achieves a state-of-the-art accuracy of 96.38% on the FloraSyntropy benchmark. Crucially, to validate its generalization capability, we test the model on the unrelated multiclass Pest dataset, where it demonstrates exceptional adaptability, achieving 99.84% accuracy. This work provides not only a valuable new resource but also a robust and highly generalizable framework that advances the field towards practical, large-scale agricultural AI applications.
17 Jul 2019
Traffic sign recognition is an important component of many advanced driving assistance systems, and it is required for full autonomous driving. Computational performance is usually the bottleneck in using large scale neural networks for this purpose. SqueezeNet is a good candidate for efficient image classification of traffic signs, but in our experiments it does not reach high accuracy, and we believe this is due to lack of data, requiring data augmentation. Generative adversarial networks can learn the high dimensional distribution of empirical data, allowing the generation of new data points. In this paper we apply pix2pix GANs architecture to generate new traffic sign images and evaluate the use of these images in data augmentation. We were motivated to use pix2pix to translate symbolic sign images to real ones due to the mode collapse in Conditional GANs. Through our experiments we found that data augmentation using GAN can increase classification accuracy for circular traffic signs from 92.1% to 94.0%, and for triangular traffic signs from 93.8% to 95.3%, producing an overall improvement of 2%. However some traditional augmentation techniques can outperform GAN data augmentation, for example contrast variation in circular traffic signs (95.5%) and displacement on triangular traffic signs (96.7 %). Our negative results shows that while GANs can be naively used for data augmentation, they are not always the best choice, depending on the problem and variability in the data.
There are no more papers matching your filters at the moment.
