23 Aug 2025
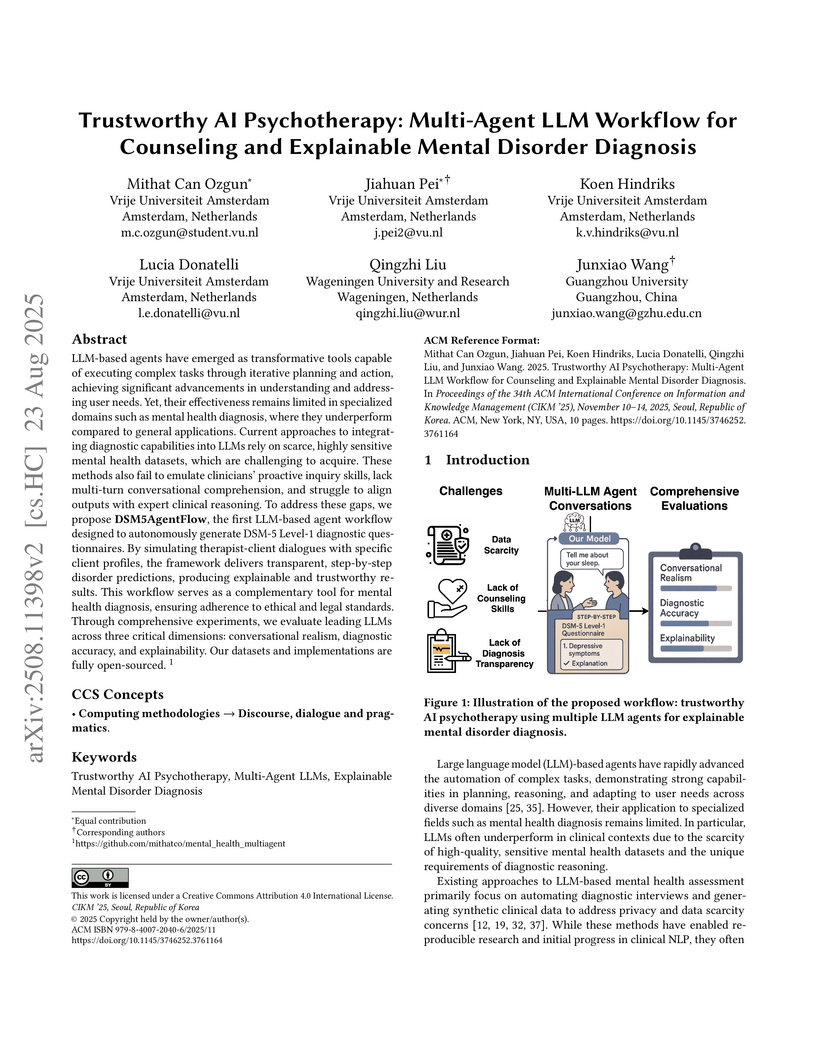
LLM-based agents have emerged as transformative tools capable of executing complex tasks through iterative planning and action, achieving significant advancements in understanding and addressing user needs. Yet, their effectiveness remains limited in specialized domains such as mental health diagnosis, where they underperform compared to general applications. Current approaches to integrating diagnostic capabilities into LLMs rely on scarce, highly sensitive mental health datasets, which are challenging to acquire. These methods also fail to emulate clinicians' proactive inquiry skills, lack multi-turn conversational comprehension, and struggle to align outputs with expert clinical reasoning. To address these gaps, we propose DSM5AgentFlow, the first LLM-based agent workflow designed to autonomously generate DSM-5 Level-1 diagnostic questionnaires. By simulating therapist-client dialogues with specific client profiles, the framework delivers transparent, step-by-step disorder predictions, producing explainable and trustworthy results. This workflow serves as a complementary tool for mental health diagnosis, ensuring adherence to ethical and legal standards. Through comprehensive experiments, we evaluate leading LLMs across three critical dimensions: conversational realism, diagnostic accuracy, and explainability. Our datasets and implementations are fully open-sourced.
26 Jul 2025
Food security remains a global concern as population grows and climate change intensifies, demanding innovative solutions for sustainable agricultural productivity. Recent advances in foundation models have demonstrated remarkable performance in remote sensing and climate sciences, and therefore offer new opportunities for agricultural monitoring. However, their application in challenges related to agriculture-such as crop type mapping, crop phenology estimation, and crop yield estimation-remains under-explored. In this work, we quantitatively evaluate existing foundational models to assess their effectivity for a representative set of agricultural tasks. From an agricultural domain perspective, we describe a requirements framework for an ideal agricultural foundation model (CropFM). We then survey and compare existing general-purpose foundational models in this framework and empirically evaluate two exemplary of them in three representative agriculture specific tasks. Finally, we highlight the need for a dedicated foundational model tailored specifically to agriculture.

28 May 2025

Accurate temporal reconstructions of plant growth are essential for plant
phenotyping and breeding, yet remain challenging due to complex geometries,
occlusions, and non-rigid deformations of plants. We present a novel framework
for building temporal digital twins of plants by combining 3D Gaussian
Splatting with a robust sample alignment pipeline. Our method begins by
reconstructing Gaussian Splats from multi-view camera data, then leverages a
two-stage registration approach: coarse alignment through feature-based
matching and Fast Global Registration, followed by fine alignment with
Iterative Closest Point. This pipeline yields a consistent 4D model of plant
development in discrete time steps. We evaluate the approach on data from the
Netherlands Plant Eco-phenotyping Center, demonstrating detailed temporal
reconstructions of Sequoia and Quinoa species. Videos and Images can be seen at
this https URL
29 Sep 2025
Forecasting system behaviour near and across bifurcations is crucial for identifying potential shifts in dynamical systems. While machine learning has recently been used to learn critical transitions and bifurcation structures from data, most studies remain limited as they exclusively focus on discrete-time methods and local bifurcations. To address these limitations, we use Neural Ordinary Differential Equations which provide a data-driven framework for learning system dynamics. Our results show that Neural Ordinary Differential Equations can recover underlying bifurcation structures directly from time-series data by learning parameter-dependent vector fields. Notably, we demonstrate that Neural Ordinary Differential Equations can forecast bifurcations even beyond the parameter regions represented in the training data. We demonstrate our approach on three test cases: the Lorenz system transitioning from non-chaotic to chaotic behaviour, the Rössler system moving from chaos to period doubling, and a predator-prey model exhibiting collapse via a global bifurcation.
21 Oct 2025
This systematic review outlines a comprehensive taxonomy of dimensionality reduction (DR) methods and their applications across the entire remote sensing data value chain, encompassing diverse modalities like hyperspectral, SAR, and LiDAR. It integrates classical signal processing with modern deep learning approaches, providing a structured understanding of DR's role from data pre-processing to advanced analysis and prediction tasks.

18 Dec 2024
Searching and detecting the task-relevant parts of plants is important to automate harvesting and de-leafing of tomato plants using robots. This is challenging due to high levels of occlusion in tomato plants. Active vision is a promising approach in which the robot strategically plans its camera viewpoints to overcome occlusion and improve perception accuracy. However, current active-vision algorithms cannot differentiate between relevant and irrelevant plant parts and spend time on perceiving irrelevant plant parts. This work proposed a semantics-aware active-vision strategy that uses semantic information to identify the relevant plant parts and prioritise them during view planning. The proposed strategy was evaluated on the task of searching and detecting the relevant plant parts using simulation and real-world experiments. In simulation experiments, the semantics-aware strategy proposed could search and detect 81.8% of the relevant plant parts using nine viewpoints. It was significantly faster and detected more plant parts than predefined, random, and volumetric active-vision strategies that do not use semantic information. The strategy proposed was also robust to uncertainty in plant and plant-part positions, plant complexity, and different viewpoint-sampling strategies. In real-world experiments, the semantics-aware strategy could search and detect 82.7% of the relevant plant parts using seven viewpoints, under complex greenhouse conditions with natural variation and occlusion, natural illumination, sensor noise, and uncertainty in camera poses. The results of this work clearly indicate the advantage of using semantics-aware active vision for targeted perception of plant parts and its applicability in the real world. It can significantly improve the efficiency of automated harvesting and de-leafing in tomato crop production.

06 Jun 2024

Crop breeding is crucial in improving agricultural productivity while potentially decreasing land usage, greenhouse gas emissions, and water consumption. However, breeding programs are challenging due to long turnover times, high-dimensional decision spaces, long-term objectives, and the need to adapt to rapid climate change. This paper introduces the use of Reinforcement Learning (RL) to optimize simulated crop breeding programs. RL agents are trained to make optimal crop selection and cross-breeding decisions based on genetic information. To benchmark RL-based breeding algorithms, we introduce a suite of Gym environments. The study demonstrates the superiority of RL techniques over standard practices in terms of genetic gain when simulated in silico using real-world genomic maize data.

16 Jun 2025
Dokuz Eylul University CNRSCSICAarhus UniversityUniversity of the Basque Country (UPV/EHU)Sapienza University of RomeMasaryk UniversityNational Biodiversity Future CenterUniversity of SienaUniversité de Picardie Jules VerneUniversity of WrocławUniversity of OviedoWageningen University and ResearchUniv Grenoble AlpesNational Academy of Sciences of UkraineUniv. Savoie Mont BlancMartin Luther University Halle-WittenbergUniversity of Nova GoricaGerman Centre for Integrative Biodiversity Research (iDiv) Halle-Jena-LeipzigSwiss Federal Institute for Forest, Snow and Landscape Research, WSLResearch Centre of the Slovenian Academy of Sciences and ArtsWageningen Environmental ResearchM.G. Kholodny Institute of BotanyInstitute for Environmental Protection and Research (ISPRA)Saints Cyril and Methodius University in SkopjePrincipality of AsturiasFlemish Institute for Technological Research VITO
CNRSCSICAarhus UniversityUniversity of the Basque Country (UPV/EHU)Sapienza University of RomeMasaryk UniversityNational Biodiversity Future CenterUniversity of SienaUniversité de Picardie Jules VerneUniversity of WrocławUniversity of OviedoWageningen University and ResearchUniv Grenoble AlpesNational Academy of Sciences of UkraineUniv. Savoie Mont BlancMartin Luther University Halle-WittenbergUniversity of Nova GoricaGerman Centre for Integrative Biodiversity Research (iDiv) Halle-Jena-LeipzigSwiss Federal Institute for Forest, Snow and Landscape Research, WSLResearch Centre of the Slovenian Academy of Sciences and ArtsWageningen Environmental ResearchM.G. Kholodny Institute of BotanyInstitute for Environmental Protection and Research (ISPRA)Saints Cyril and Methodius University in SkopjePrincipality of AsturiasFlemish Institute for Technological Research VITO
CNRSCSICAarhus UniversityUniversity of the Basque Country (UPV/EHU)Sapienza University of RomeMasaryk UniversityNational Biodiversity Future CenterUniversity of SienaUniversité de Picardie Jules VerneUniversity of WrocławUniversity of OviedoWageningen University and ResearchUniv Grenoble AlpesNational Academy of Sciences of UkraineUniv. Savoie Mont BlancMartin Luther University Halle-WittenbergUniversity of Nova GoricaGerman Centre for Integrative Biodiversity Research (iDiv) Halle-Jena-LeipzigSwiss Federal Institute for Forest, Snow and Landscape Research, WSLResearch Centre of the Slovenian Academy of Sciences and ArtsWageningen Environmental ResearchM.G. Kholodny Institute of BotanyInstitute for Environmental Protection and Research (ISPRA)Saints Cyril and Methodius University in SkopjePrincipality of AsturiasFlemish Institute for Technological Research VITOThe EUNIS habitat classification is crucial for categorising European
habitats, supporting European policy on nature conservation and implementing
the Nature Restoration Law. To meet the growing demand for detailed and
accurate habitat information, we provide spatial predictions for 260 EUNIS
habitat types at hierarchical level 3, together with independent validation and
uncertainty analyses.
Using ensemble machine learning models, together with high-resolution
satellite imagery and ecologically meaningful climatic, topographic and edaphic
variables, we produced a European habitat map indicating the most probable
EUNIS habitat at 100-m resolution across Europe. Additionally, we provide
information on prediction uncertainty and the most probable habitats at level 3
within each EUNIS level 1 formation. This product is particularly useful for
both conservation and restoration purposes.
Predictions were cross-validated at European scale using a spatial block
cross-validation and evaluated against independent data from France (forests
only), the Netherlands and Austria. The habitat maps obtained strong predictive
performances on the validation datasets with distinct trade-offs in terms of
recall and precision across habitat formations.

31 Oct 2024
The 3D reconstruction of plants is challenging due to their complex shape causing many occlusions. Next-Best-View (NBV) methods address this by iteratively selecting new viewpoints to maximize information gain (IG). Deep-learning-based NBV (DL-NBV) methods demonstrate higher computational efficiency over classic voxel-based NBV approaches but current methods require extensive training using ground-truth plant models, making them impractical for real-world plants. These methods, moreover, rely on offline training with pre-collected data, limiting adaptability in changing agricultural environments. This paper proposes a self-supervised learning-based NBV method (SSL-NBV) that uses a deep neural network to predict the IG for candidate viewpoints. The method allows the robot to gather its own training data during task execution by comparing new 3D sensor data to the earlier gathered data and by employing weakly-supervised learning and experience replay for efficient online learning. Comprehensive evaluations were conducted in simulation and real-world environments using cross-validation. The results showed that SSL-NBV required fewer views for plant reconstruction than non-NBV methods and was over 800 times faster than a voxel-based method. SSL-NBV reduced training annotations by over 90% compared to a baseline DL-NBV. Furthermore, SSL-NBV could adapt to novel scenarios through online fine-tuning. Also using real plants, the results showed that the proposed method can learn to effectively plan new viewpoints for 3D plant reconstruction. Most importantly, SSL-NBV automated the entire network training and uses continuous online learning, allowing it to operate in changing agricultural environments.
08 Sep 2025
Current approaches to chemical map generation from hyperspectral images are based on models such as partial least squares (PLS) regression, generating pixel-wise predictions that do not consider spatial context and suffer from a high degree of noise. This study proposes an end-to-end deep learning approach using a modified version of U-Net and a custom loss function to directly obtain chemical maps from hyperspectral images, skipping all intermediate steps required for traditional pixel-wise analysis. The U-Net is compared with the traditional PLS regression on a real dataset of pork belly samples with associated mean fat reference values. The U-Net obtains a test set root mean squared error of between 9% and 13% lower than that of PLS regression on the task of mean fat prediction. At the same time, U-Net generates fine detail chemical maps where 99.91% of the variance is spatially correlated. Conversely, only 2.53% of the variance in the PLS-generated chemical maps is spatially correlated, indicating that each pixel-wise prediction is largely independent of neighboring pixels. Additionally, while the PLS-generated chemical maps contain predictions far beyond the physically possible range of 0-100%, U-Net learns to stay inside this range. Thus, the findings of this study indicate that U-Net is superior to PLS for chemical map generation.
13 Jul 2025
Habitats integrate the abiotic conditions and biophysical structures that support biodiversity and sustain nature's contributions to people. As these ecosystems face mounting pressure from human activities, accurate, high-resolution habitat maps are essential for effective conservation and restoration. Yet current maps often fall short in thematic or spatial resolution because they must (1) model several mutually exclusive habitat types that co-occur across landscapes and (2) cope with severe class imbalance that complicate multi-class training. Here, we evaluated how high-resolution remote sensing (RS) data and Artificial Intelligence (AI) tools can improve habitat classification over large geographic extents at fine thematic resolution. Using vegetation plots from the European Vegetation Archive, we modelled Level 3 EUNIS habitats across Europe and assessed multiple modelling strategies against independent validation datasets. Strategies that exploited the hierarchical nature of habitat nomenclatures resolved classification ambiguities, especially in fragmented landscapes. Integrating multi-spectral (MSI) and synthetic aperture radar (SAR) imagery, particularly through Earth Observation Foundation models, enhanced within-formation discrimination and overall performance. Finally, ensemble machine learning that corrects class imbalance boosted accuracy further. Our methodological framework is transferable beyond Europe and adaptable to other classification systems. Future research should advance temporal modelling of dynamic habitats, extend to habitat segmentation and quality assessment, and exploit next-generation EO data paired with higher-quality in-situ observations.
25 Feb 2025

Air pollution remains a leading global health risk, exacerbated by rapid
industrialization and urbanization, contributing significantly to morbidity and
mortality rates. In this paper, we introduce AirCast, a novel multi-variable
air pollution forecasting model, by combining weather and air quality
variables. AirCast employs a multi-task head architecture that simultaneously
forecasts atmospheric conditions and pollutant concentrations, improving its
understanding of how weather patterns affect air quality. Predicting extreme
pollution events is challenging due to their rare occurrence in historic data,
resulting in a heavy-tailed distribution of pollution levels. To address this,
we propose a novel Frequency-weighted Mean Absolute Error (fMAE) loss, adapted
from the class-balanced loss for regression tasks. Informed from domain
knowledge, we investigate the selection of key variables known to influence
pollution levels. Additionally, we align existing weather and chemical datasets
across spatial and temporal dimensions. AirCast's integrated approach,
combining multi-task learning, frequency weighted loss and domain informed
variable selection, enables more accurate pollution forecasts. Our source code
and models are made public here (this https URL)
22 Jun 2025
 University College London
University College London Zhejiang UniversityTilburg UniversityUniversity of LiverpoolUniversity of ZagrebBergische Universität WuppertalUniversity of VeronaTechnical University of DarmstadtFriedrich-Schiller-Universität JenaWilfrid Laurier University
Zhejiang UniversityTilburg UniversityUniversity of LiverpoolUniversity of ZagrebBergische Universität WuppertalUniversity of VeronaTechnical University of DarmstadtFriedrich-Schiller-Universität JenaWilfrid Laurier University Chalmers University of Technology
Chalmers University of Technology University of GroningenUniversity of BathUniversity of Southern DenmarkUniversity of AdelaideUniversity of LisbonIMT AtlantiqueRobert Gordon UniversityWageningen University and ResearchLoughborough UniversityCopenhagen Business SchoolBerlin School of Economics and LawUniversity of the West of EnglandErasmus UniversityTexas Christian UniversityCentral Queensland UniversityThe University of Sydney Business SchoolKühne Logistics UniversityKEDGE Business SchoolUniversity of Exeter Business SchoolUniversity of Sussex Business SchoolMaryville University of Saint LouisRabdan AcademyUniversity of Southampton Business SchoolKoc
UniversityUniversity of Naples
“Federico II”
University of GroningenUniversity of BathUniversity of Southern DenmarkUniversity of AdelaideUniversity of LisbonIMT AtlantiqueRobert Gordon UniversityWageningen University and ResearchLoughborough UniversityCopenhagen Business SchoolBerlin School of Economics and LawUniversity of the West of EnglandErasmus UniversityTexas Christian UniversityCentral Queensland UniversityThe University of Sydney Business SchoolKühne Logistics UniversityKEDGE Business SchoolUniversity of Exeter Business SchoolUniversity of Sussex Business SchoolMaryville University of Saint LouisRabdan AcademyUniversity of Southampton Business SchoolKoc
UniversityUniversity of Naples
“Federico II”
Operations and Supply Chain Management (OSCM) has continually evolved, incorporating a broad array of strategies, frameworks, and technologies to address complex challenges across industries. This encyclopedic article provides a comprehensive overview of contemporary strategies, tools, methods, principles, and best practices that define the field's cutting-edge advancements. It also explores the diverse environments where OSCM principles have been effectively implemented. The article is meant to be read in a nonlinear fashion. It should be used as a point of reference or first-port-of-call for a diverse pool of readers: academics, researchers, students, and practitioners.

10 Jun 2025
This paper presents an adaptive path planner for object search in agricultural fields using UAVs. The path planner uses a high-altitude coverage flight path and plans additional low-altitude inspections when the detection network is uncertain. The path planner was evaluated in an offline simulation environment containing real-world images. We trained a YOLOv8 detection network to detect artificial plants placed in grass fields to showcase the potential of our path planner. We evaluated the effect of different detection certainty measures, optimized the path planning parameters, investigated the effects of localization errors, and different numbers of objects in the field. The YOLOv8 detection confidence worked best to differentiate between true and false positive detections and was therefore used in the adaptive planner. The optimal parameters of the path planner depended on the distribution of objects in the field. When the objects were uniformly distributed, more low-altitude inspections were needed compared to a non-uniform distribution of objects, resulting in a longer path length. The adaptive planner proved to be robust against localization uncertainty. When increasing the number of objects, the flight path length increased, especially when the objects were uniformly distributed. When the objects were non-uniformly distributed, the adaptive path planner yielded a shorter path than a low-altitude coverage path, even with a high number of objects. Overall, the presented adaptive path planner allowed finding non-uniformly distributed objects in a field faster than a coverage path planner and resulted in a compatible detection accuracy. The path planner is made available at this https URL.

23 Apr 2021
Nitrogen fertilizers have a detrimental effect on the environment, which can
be reduced by optimizing fertilizer management strategies. We implement an
OpenAI Gym environment where a reinforcement learning agent can learn
fertilization management policies using process-based crop growth models and
identify policies with reduced environmental impact. In our environment, an
agent trained with the Proximal Policy Optimization algorithm is more
successful at reducing environmental impacts than the other baseline agents we
present.

14 Mar 2019
In this paper, we propose to tackle the problem of reducing discrepancies between multiple domains referred to as multi-source domain adaptation and consider it under the target shift assumption: in all domains we aim to solve a classification problem with the same output classes, but with labels' proportions differing across them. This problem, generally ignored in the vast majority papers on domain adaptation papers, is nevertheless critical in real-world applications, and we theoretically show its impact on the adaptation success. To address this issue, we design a method based on optimal transport, a theory that has been successfully used to tackle adaptation problems in machine learning. Our method performs multi-source adaptation and target shift correction simultaneously by learning the class probabilities of the unlabeled target sample and the coupling allowing to align two (or more) probability distributions. Experiments on both synthetic and real-world data related to satellite image segmentation task show the superiority of the proposed method over the state-of-the-art.

27 Jun 2025
UAVs are becoming popular in agriculture, however, they usually use time-consuming row-by-row flight paths. This paper presents a deep-reinforcement-learning-based approach for path planning to efficiently localize weeds in agricultural fields using UAVs with minimal flight-path length. The method combines prior knowledge about the field containing uncertain, low-resolution weed locations with in-flight weed detections. The search policy was learned using deep Q-learning. We trained the agent in simulation, allowing a thorough evaluation of the weed distribution, typical errors in the perception system, prior knowledge, and different stopping criteria on the planner's performance. When weeds were non-uniformly distributed over the field, the agent found them faster than a row-by-row path, showing its capability to learn and exploit the weed distribution. Detection errors and prior knowledge quality had a minor effect on the performance, indicating that the learned search policy was robust to detection errors and did not need detailed prior knowledge. The agent also learned to terminate the search. To test the transferability of the learned policy to a real-world scenario, the planner was tested on real-world image data without further training, which showed a 66% shorter path compared to a row-by-row path at the cost of a 10% lower percentage of found weeds. Strengths and weaknesses of the planner for practical application are comprehensively discussed, and directions for further development are provided. Overall, it is concluded that the learned search policy can improve the efficiency of finding non-uniformly distributed weeds using a UAV and shows potential for use in agricultural practice.

08 Nov 2022
Drones have shown to be useful aerial vehicles for unmanned transport
missions such as food and medical supply delivery. This can be leveraged to
deliver life-saving nutrition and medicine for people in emergency situations.
However, commercial drones can generally only carry 10 % - 30 % of their own
mass as payload, which limits the amount of food delivery in a single flight.
One novel solution to noticeably increase the food-carrying ratio of a drone,
is recreating some structures of a drone, such as the wings, with edible
materials. We thus propose a drone, which is no longer only a food transporting
aircraft, but itself is partially edible, increasing its food-carrying mass
ratio to 50 %, owing to its edible wings. Furthermore, should the edible drone
be left behind in the environment after performing its task in an emergency
situation, it will be more biodegradable than its non-edible counterpart,
leaving less waste in the environment. Here we describe the choice of materials
and scalable design of edible wings, and validate the method in a
flight-capable prototype that can provide 300 kcal and carry a payload of 80 g
of water.
06 Nov 2022
In contrast to the rapid digitalization of several industries, agriculture
suffers from low adoption of climate-smart farming tools. Even though AI-driven
digital agriculture can offer high-performing predictive functionalities, it
lacks tangible quantitative evidence on its benefits to the farmers. Field
experiments can derive such evidence, but are often costly and time consuming.
To this end, we propose an observational causal inference framework for the
empirical evaluation of the impact of digital tools on target farm performance
indicators. This way, we can increase farmers' trust by enhancing the
transparency of the digital agriculture market, and in turn accelerate the
adoption of technologies that aim to increase productivity and secure a
sustainable and resilient agriculture against a changing climate. As a case
study, we perform an empirical evaluation of a recommendation system for
optimal cotton sowing, which was used by a farmers' cooperative during the
growing season of 2021. We leverage agricultural knowledge to develop a causal
graph of the farm system, we use the back-door criterion to identify the impact
of recommendations on the yield and subsequently estimate it using several
methods on observational data. The results show that a field sown according to
our recommendations enjoyed a significant increase in yield (12% to 17%).

18 Dec 2024
Robots in tomato greenhouses need to perceive the plant and plant parts accurately to automate monitoring, harvesting, and de-leafing tasks. Existing perception systems struggle with the high levels of occlusion in plants and often result in poor perception accuracy. One reason for this is because they use fixed cameras or predefined camera movements. Next-best-view (NBV) planning presents an alternate approach, in which the camera viewpoints are reasoned and strategically planned such that the perception accuracy is improved. However, existing NBV-planning algorithms are agnostic to the task-at-hand and give equal importance to all the plant parts. This strategy is inefficient for greenhouse tasks that require targeted perception of specific plant parts, such as the perception of leaf nodes for de-leafing. To improve targeted perception in complex greenhouse environments, NBV planning algorithms need an attention mechanism to focus on the task-relevant plant parts. In this paper, the role of attention in improving targeted perception using an attention-driven NBV planning strategy was investigated. Through simulation experiments using plants with high levels of occlusion and structural complexity, it was shown that focusing attention on task-relevant plant parts can significantly improve the speed and accuracy of 3D reconstruction. Further, with real-world experiments, it was shown that these benefits extend to complex greenhouse conditions with natural variation and occlusion, natural illumination, sensor noise, and uncertainty in camera poses. The results clearly indicate that using attention-driven NBV planning in greenhouses can significantly improve the efficiency of perception and enhance the performance of robotic systems in greenhouse crop production.
There are no more papers matching your filters at the moment.
