20 Jul 2024


Researchers from Monash University and collaborating institutions introduce LongVLM, a VideoLLM that achieves fine-grained understanding of long videos by efficiently integrating local, temporally ordered segment features with global semantic context. The model outperforms previous state-of-the-art methods on the VideoChatGPT benchmark, showing improvements in Detail Orientation (+0.17) and Consistency (+0.65), and achieves higher accuracy on zero-shot video QA datasets like ANET-QA, MSRVTT-QA, and MSVD-QA.

12 Mar 2025


Researchers from Australian National University, University of Sydney, Tencent, and other institutions developed "Motion Anything," a framework for human motion generation that adaptively integrates multimodal conditions like text and music. It employs an attention-based masking strategy to dynamically prioritize motion segments, outperforming prior models in text-to-motion (e.g., 15% lower FID on HumanML3D) and music-to-dance tasks, and introduces a new Text-Music-Dance dataset.
21 Aug 2025



DictAS introduces a self-supervised framework for class-generalizable few-shot anomaly segmentation by modeling anomaly detection as a dictionary lookup task, inspired by human cognition. The approach leverages a frozen CLIP backbone and trains on normal data only, achieving new state-of-the-art performance across diverse industrial and medical datasets while maintaining high efficiency and robustness.
19 Mar 2025

Vision-and-Language Navigation (VLN) suffers from the limited diversity and
scale of training data, primarily constrained by the manual curation of
existing simulators. To address this, we introduce RoomTour3D, a
video-instruction dataset derived from web-based room tour videos that capture
real-world indoor spaces and human walking demonstrations. Unlike existing VLN
datasets, RoomTour3D leverages the scale and diversity of online videos to
generate open-ended human walking trajectories and open-world navigable
instructions. To compensate for the lack of navigation data in online videos,
we perform 3D reconstruction and obtain 3D trajectories of walking paths
augmented with additional information on the room types, object locations and
3D shape of surrounding scenes. Our dataset includes 100K open-ended
description-enriched trajectories with 200K instructions, and 17K
action-enriched trajectories from 1847 room tour environments. We demonstrate
experimentally that RoomTour3D enables significant improvements across multiple
VLN tasks including CVDN, SOON, R2R, and REVERIE. Moreover, RoomTour3D
facilitates the development of trainable zero-shot VLN agents, showcasing the
potential and challenges of advancing towards open-world navigation.

05 Feb 2025

Shot2Story introduces a new multi-modal benchmark for comprehensive understanding of multi-shot videos, providing detailed shot-level visual and narration captions, high-quality video summaries, and challenging question-answering pairs. The benchmark demonstrates that models leveraging explicit shot structure and audio cues achieve superior performance in complex multi-shot video understanding tasks compared to existing approaches.
10 Mar 2025

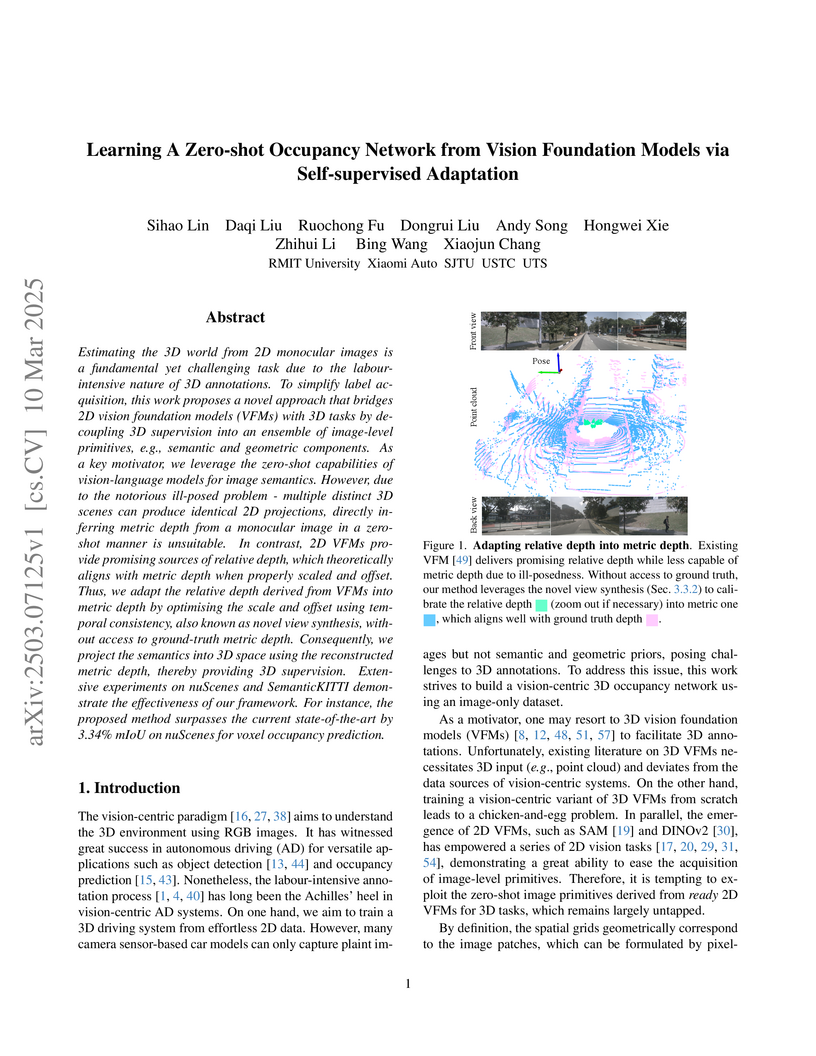
Researchers developed a self-supervised framework for zero-shot 3D occupancy prediction that leverages unlabeled 2D images and Vision Foundation Models. This method converts relative depth from VFMs into metric depth using novel view synthesis, enabling the generation of pseudo-3D supervision to train a 3D occupancy network without 3D annotations.

12 Jun 2024


This paper provides a systematic overview of leveraging Large Language Models for Natural Language Generation evaluation, introducing a coherent taxonomy to categorize existing methods. It details the capabilities and limitations of current LLM-based evaluation techniques, finding them to correlate better with human judgment but incur higher computational costs and exhibit specific biases.

20 May 2025
Ensuring the reliability and safety of machine learning models in open-world
deployment is a central challenge in AI safety. This thesis develops both
algorithmic and theoretical foundations to address key reliability issues
arising from distributional uncertainty and unknown classes, from standard
neural networks to modern foundation models like large language models (LLMs).
Traditional learning paradigms, such as empirical risk minimization (ERM),
assume no distribution shift between training and inference, often leading to
overconfident predictions on out-of-distribution (OOD) inputs. This thesis
introduces novel frameworks that jointly optimize for in-distribution accuracy
and reliability to unseen data. A core contribution is the development of an
unknown-aware learning framework that enables models to recognize and handle
novel inputs without labeled OOD data.
We propose new outlier synthesis methods, VOS, NPOS, and DREAM-OOD, to
generate informative unknowns during training. Building on this, we present
SAL, a theoretical and algorithmic framework that leverages unlabeled
in-the-wild data to enhance OOD detection under realistic deployment
conditions. These methods demonstrate that abundant unlabeled data can be
harnessed to recognize and adapt to unforeseen inputs, providing formal
reliability guarantees.
The thesis also extends reliable learning to foundation models. We develop
HaloScope for hallucination detection in LLMs, MLLMGuard for defending against
malicious prompts in multimodal models, and data cleaning methods to denoise
human feedback used for better alignment. These tools target failure modes that
threaten the safety of large-scale models in deployment.
Overall, these contributions promote unknown-aware learning as a new
paradigm, and we hope it can advance the reliability of AI systems with minimal
human efforts.

18 Mar 2025

The integration of conversational agents into our daily lives has become
increasingly common, yet many of these agents cannot engage in deep
interactions with humans. Despite this, there is a noticeable shortage of
datasets that capture multimodal information from human-robot interaction
dialogues. To address this gap, we have recorded a novel multimodal dataset
(MERCI) that encompasses rich embodied interaction data. The process involved
asking participants to complete a questionnaire and gathering their profiles on
ten topics, such as hobbies and favorite music. Subsequently, we initiated
conversations between the robot and the participants, leveraging GPT-4 to
generate contextually appropriate responses based on the participant's profile
and emotional state, as determined by facial expression recognition and
sentiment analysis. Automatic and user evaluations were conducted to assess the
overall quality of the collected data. The results of both evaluations
indicated a high level of naturalness, engagement, fluency, consistency, and
relevance in the conversation, as well as the robot's ability to provide
empathetic responses. It is worth noting that the dataset is derived from
genuine interactions with the robot, involving participants who provided
personal information and conveyed actual emotions.
08 Apr 2024


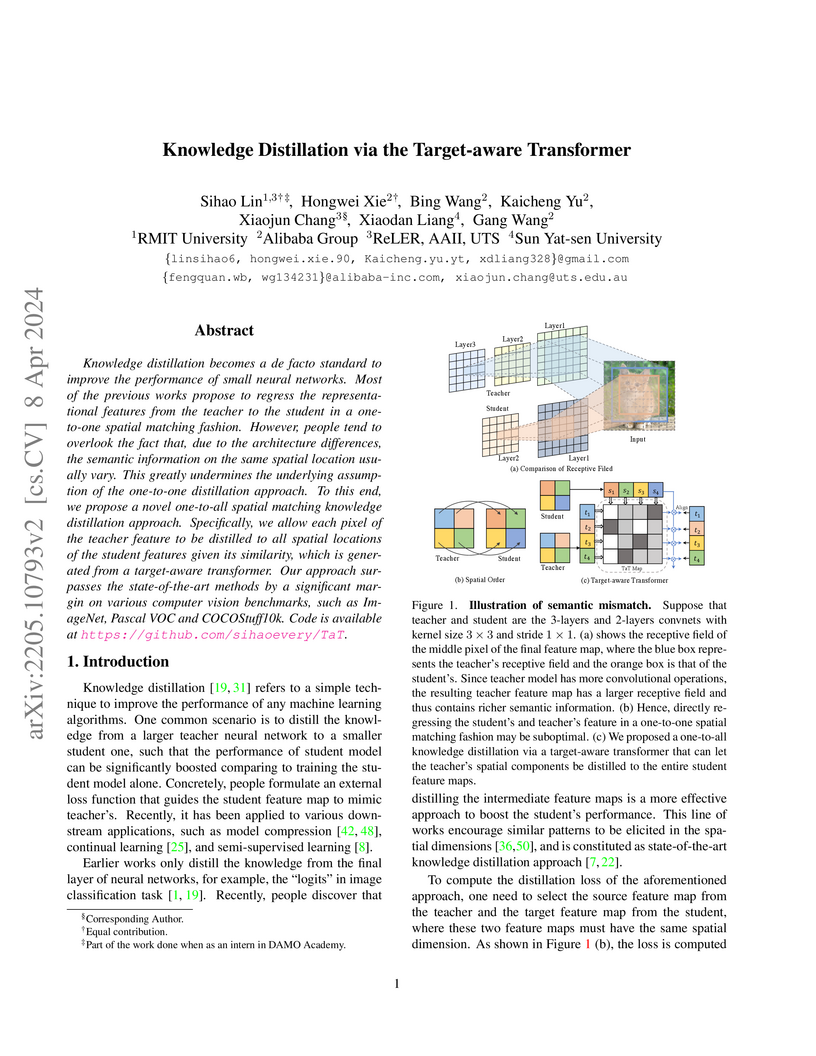
Knowledge distillation becomes a de facto standard to improve the performance of small neural networks. Most of the previous works propose to regress the representational features from the teacher to the student in a one-to-one spatial matching fashion. However, people tend to overlook the fact that, due to the architecture differences, the semantic information on the same spatial location usually vary. This greatly undermines the underlying assumption of the one-to-one distillation approach. To this end, we propose a novel one-to-all spatial matching knowledge distillation approach. Specifically, we allow each pixel of the teacher feature to be distilled to all spatial locations of the student features given its similarity, which is generated from a target-aware transformer. Our approach surpasses the state-of-the-art methods by a significant margin on various computer vision benchmarks, such as ImageNet, Pascal VOC and COCOStuff10k. Code is available at this https URL.
23 Mar 2023


Deep point cloud registration methods face challenges to partial overlaps and
rely on labeled data. To address these issues, we propose UDPReg, an
unsupervised deep probabilistic registration framework for point clouds with
partial overlaps. Specifically, we first adopt a network to learn posterior
probability distributions of Gaussian mixture models (GMMs) from point clouds.
To handle partial point cloud registration, we apply the Sinkhorn algorithm to
predict the distribution-level correspondences under the constraint of the
mixing weights of GMMs. To enable unsupervised learning, we design three
distribution consistency-based losses: self-consistency, cross-consistency, and
local contrastive. The self-consistency loss is formulated by encouraging GMMs
in Euclidean and feature spaces to share identical posterior distributions. The
cross-consistency loss derives from the fact that the points of two partially
overlapping point clouds belonging to the same clusters share the cluster
centroids. The cross-consistency loss allows the network to flexibly learn a
transformation-invariant posterior distribution of two aligned point clouds.
The local contrastive loss facilitates the network to extract discriminative
local features. Our UDPReg achieves competitive performance on the
3DMatch/3DLoMatch and ModelNet/ModelLoNet benchmarks.
12 Dec 2023

The InteR framework introduces an iterative information refinement process that synergistically combines Retrieval Models and Large Language Models for information retrieval. This approach achieved state-of-the-art zero-shot retrieval performance, outperforming previous zero-shot baselines by over 8% absolute MAP gain and often surpassing supervised fine-tuned methods on web search and low-resource benchmarks.
01 Nov 2024
Audio-driven simultaneous gesture generation is vital for human-computer
communication, AI games, and film production. While previous research has shown
promise, there are still limitations. Methods based on VAEs are accompanied by
issues of local jitter and global instability, whereas methods based on
diffusion models are hampered by low generation efficiency. This is because the
denoising process of DDPM in the latter relies on the assumption that the noise
added at each step is sampled from a unimodal distribution, and the noise
values are small. DDIM borrows the idea from the Euler method for solving
differential equations, disrupts the Markov chain process, and increases the
noise step size to reduce the number of denoising steps, thereby accelerating
generation. However, simply increasing the step size during the step-by-step
denoising process causes the results to gradually deviate from the original
data distribution, leading to a significant drop in the quality of the
generated actions and the emergence of unnatural artifacts. In this paper, we
break the assumptions of DDPM and achieves breakthrough progress in denoising
speed and fidelity. Specifically, we introduce a conditional GAN to capture
audio control signals and implicitly match the multimodal denoising
distribution between the diffusion and denoising steps within the same sampling
step, aiming to sample larger noise values and apply fewer denoising steps for
high-speed generation.

20 Jul 2020
Reducing cost and power consumption while maintaining high network access
capability is a key physical-layer requirement of massive Internet of Things
(mIoT) networks. Deploying a hybrid array is a cost- and energy-efficient way
to meet the requirement, but would penalize system degree of freedom (DoF) and
channel estimation accuracy. This is because signals from multiple antennas are
combined by a radio frequency (RF) network of the hybrid array. This paper
presents a novel hybrid uniform circular cylindrical array (UCyA) for mIoT
networks. We design a nested hybrid beamforming structure based on sparse array
techniques and propose the corresponding channel estimation method based on the
second-order channel statistics. As a result, only a small number of RF chains
are required to preserve the DoF of the UCyA. We also propose a new
tensor-based two-dimensional (2-D) direction-of-arrival (DoA) estimation
algorithm tailored for the proposed hybrid array. The algorithm suppresses the
noise components in all tensor modes and operates on the signal data model
directly, hence improving estimation accuracy with an affordable computational
complexity. Corroborated by a Cramer-Rao lower bound (CRLB) analysis,
simulation results show that the proposed hybrid UCyA array and the DoA
estimation algorithm can accurately estimate the 2-D DoAs of a large number of
IoT devices.
01 Apr 2019
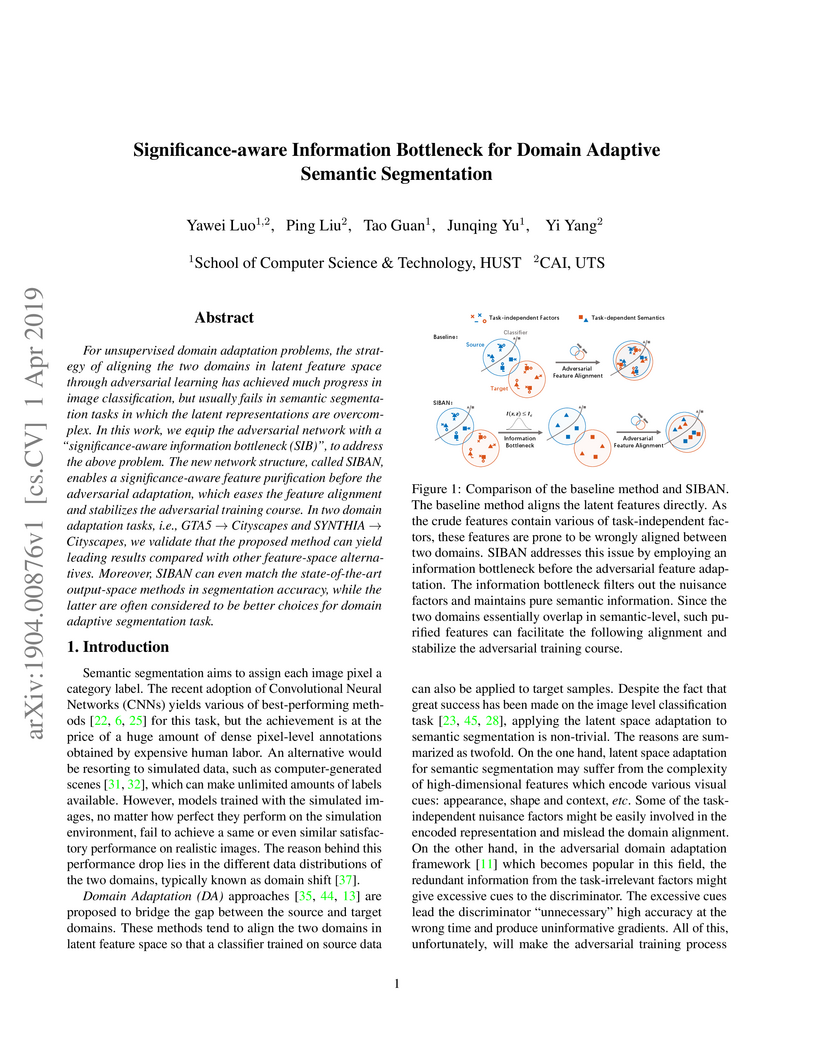
For unsupervised domain adaptation problems, the strategy of aligning the two domains in latent feature space through adversarial learning has achieved much progress in image classification, but usually fails in semantic segmentation tasks in which the latent representations are overcomplex. In this work, we equip the adversarial network with a "significance-aware information bottleneck (SIB)", to address the above problem. The new network structure, called SIBAN, enables a significance-aware feature purification before the adversarial adaptation, which eases the feature alignment and stabilizes the adversarial training course. In two domain adaptation tasks, i.e., GTA5 -> Cityscapes and SYNTHIA -> Cityscapes, we validate that the proposed method can yield leading results compared with other feature-space alternatives. Moreover, SIBAN can even match the state-of-the-art output-space methods in segmentation accuracy, while the latter are often considered to be better choices for domain adaptive segmentation task.
22 Feb 2021
Accurate channel parameter estimation is challenging for wideband
millimeter-wave (mmWave) large-scale hybrid arrays, due to beam squint and much
fewer radio frequency (RF) chains than antennas. This paper presents a novel
joint delay and angle estimation approach for wideband mmWave fully-connected
hybrid uniform cylindrical arrays. We first design a new hybrid beamformer to
reduce the dimension of received signals on the horizontal plane by exploiting
the convergence of the Bessel function, and to reduce the active beams in the
vertical direction through preselection. The important recurrence relationship
of the received signals needed for subspace-based angle and delay estimation is
preserved, even with substantially fewer RF chains than antennas. Then, linear
interpolation is generalized to reconstruct the received signals of the hybrid
beamformer, so that the signals can be coherently combined across the whole
band to suppress the beam squint. As a result, efficient subspace-based
algorithm algorithms can be developed to estimate the angles and delays of
multipath components. The estimated delays and angles are further matched and
correctly associated with different paths in the presence of non-negligible
noises, by putting forth perturbation operations. Simulations show that the
proposed approach can approach the Cram\'{e}r-Rao lower bound (CRLB) of the
estimation with a significantly lower computational complexity than existing
techniques.
07 Mar 2021
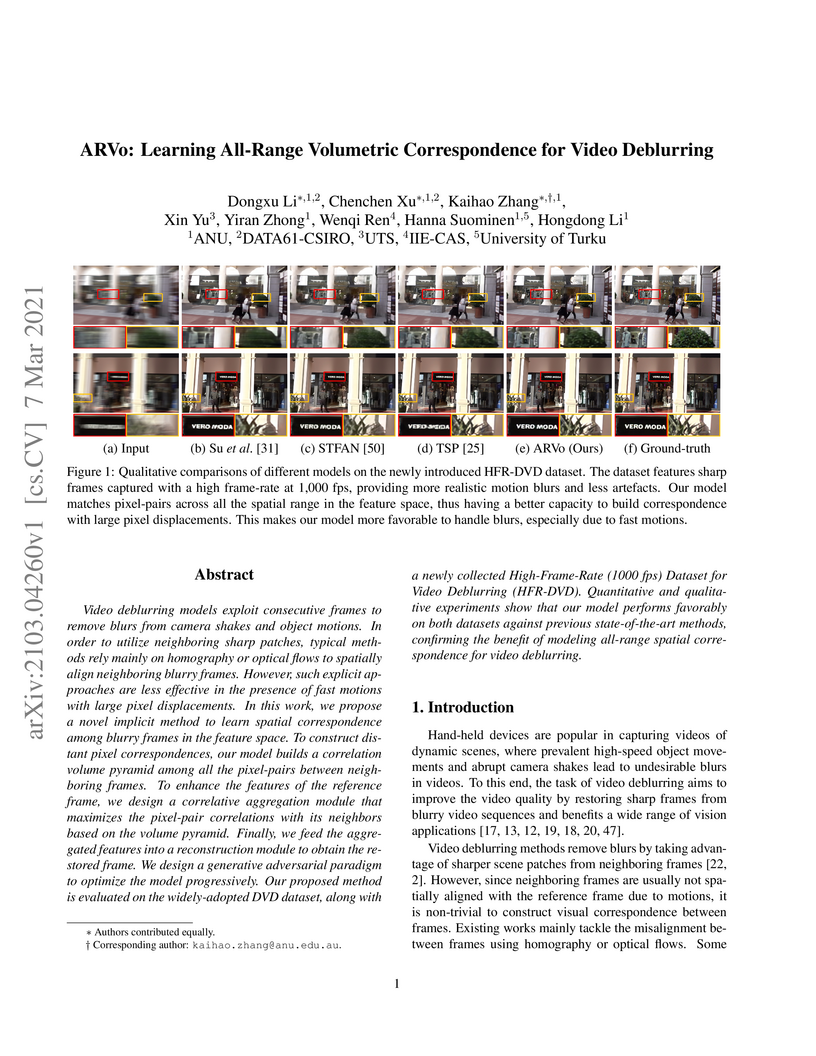
Video deblurring models exploit consecutive frames to remove blurs from
camera shakes and object motions. In order to utilize neighboring sharp
patches, typical methods rely mainly on homography or optical flows to
spatially align neighboring blurry frames. However, such explicit approaches
are less effective in the presence of fast motions with large pixel
displacements. In this work, we propose a novel implicit method to learn
spatial correspondence among blurry frames in the feature space. To construct
distant pixel correspondences, our model builds a correlation volume pyramid
among all the pixel-pairs between neighboring frames. To enhance the features
of the reference frame, we design a correlative aggregation module that
maximizes the pixel-pair correlations with its neighbors based on the volume
pyramid. Finally, we feed the aggregated features into a reconstruction module
to obtain the restored frame. We design a generative adversarial paradigm to
optimize the model progressively. Our proposed method is evaluated on the
widely-adopted DVD dataset, along with a newly collected High-Frame-Rate (1000
fps) Dataset for Video Deblurring (HFR-DVD). Quantitative and qualitative
experiments show that our model performs favorably on both datasets against
previous state-of-the-art methods, confirming the benefit of modeling all-range
spatial correspondence for video deblurring.
25 Nov 2021

Differentiable Architecture Search (DARTS) has received massive attention in
recent years, mainly because it significantly reduces the computational cost
through weight sharing and continuous relaxation. However, more recent works
find that existing differentiable NAS techniques struggle to outperform naive
baselines, yielding deteriorative architectures as the search proceeds. Rather
than directly optimizing the architecture parameters, this paper formulates the
neural architecture search as a distribution learning problem through relaxing
the architecture weights into Gaussian distributions. By leveraging the
natural-gradient variational inference (NGVI), the architecture distribution
can be easily optimized based on existing codebases without incurring more
memory and computational consumption. We demonstrate how the differentiable NAS
benefits from Bayesian principles, enhancing exploration and improving
stability. The experimental results on NAS-Bench-201 and NAS-Bench-1shot1
benchmark datasets confirm the significant improvements the proposed framework
can make. In addition, instead of simply applying the argmax on the learned
parameters, we further leverage the recently-proposed training-free proxies in
NAS to select the optimal architecture from a group architectures drawn from
the optimized distribution, where we achieve state-of-the-art results on the
NAS-Bench-201 and NAS-Bench-1shot1 benchmarks. Our best architecture in the
DARTS search space also obtains competitive test errors with 2.37\%, 15.72\%,
and 24.2\% on CIFAR-10, CIFAR-100, and ImageNet datasets, respectively.

13 Mar 2022
In a model inversion attack, an adversary attempts to reconstruct the data records, used to train a target model, using only the model's output. In launching a contemporary model inversion attack, the strategies discussed are generally based on either predicted confidence score vectors, i.e., black-box attacks, or the parameters of a target model, i.e., white-box attacks. However, in the real world, model owners usually only give out the predicted labels; the confidence score vectors and model parameters are hidden as a defense mechanism to prevent such attacks. Unfortunately, we have found a model inversion method that can reconstruct the input data records based only on the output labels. We believe this is the attack that requires the least information to succeed and, therefore, has the best applicability. The key idea is to exploit the error rate of the target model to compute the median distance from a set of data records to the decision boundary of the target model. The distance, then, is used to generate confidence score vectors which are adopted to train an attack model to reconstruct the data records. The experimental results show that highly recognizable data records can be reconstructed with far less information than existing methods.
12 Apr 2022
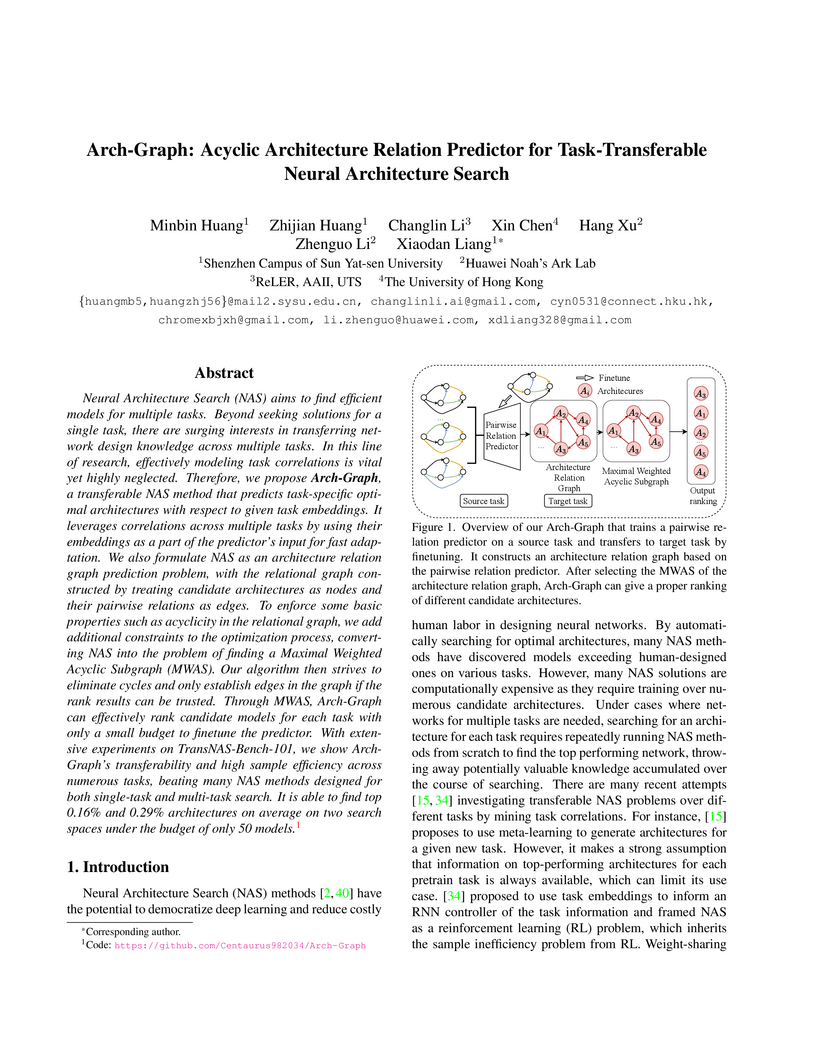
Arch-Graph: Acyclic Architecture Relation Predictor for Task-Transferable Neural Architecture Search
Arch-Graph: Acyclic Architecture Relation Predictor for Task-Transferable Neural Architecture Search


Neural Architecture Search (NAS) aims to find efficient models for multiple
tasks. Beyond seeking solutions for a single task, there are surging interests
in transferring network design knowledge across multiple tasks. In this line of
research, effectively modeling task correlations is vital yet highly neglected.
Therefore, we propose \textbf{Arch-Graph}, a transferable NAS method that
predicts task-specific optimal architectures with respect to given task
embeddings. It leverages correlations across multiple tasks by using their
embeddings as a part of the predictor's input for fast adaptation. We also
formulate NAS as an architecture relation graph prediction problem, with the
relational graph constructed by treating candidate architectures as nodes and
their pairwise relations as edges. To enforce some basic properties such as
acyclicity in the relational graph, we add additional constraints to the
optimization process, converting NAS into the problem of finding a Maximal
Weighted Acyclic Subgraph (MWAS). Our algorithm then strives to eliminate
cycles and only establish edges in the graph if the rank results can be
trusted. Through MWAS, Arch-Graph can effectively rank candidate models for
each task with only a small budget to finetune the predictor. With extensive
experiments on TransNAS-Bench-101, we show Arch-Graph's transferability and
high sample efficiency across numerous tasks, beating many NAS methods designed
for both single-task and multi-task search. It is able to find top 0.16\% and
0.29\% architectures on average on two search spaces under the budget of only
50 models.
There are no more papers matching your filters at the moment.
