
09 May 2020






Machine-learning (ML) hardware and software system demand is burgeoning. Driven by ML applications, the number of different ML inference systems has exploded. Over 100 organizations are building ML inference chips, and the systems that incorporate existing models span at least three orders of magnitude in power consumption and five orders of magnitude in performance; they range from embedded devices to data-center solutions. Fueling the hardware are a dozen or more software frameworks and libraries. The myriad combinations of ML hardware and ML software make assessing ML-system performance in an architecture-neutral, representative, and reproducible manner challenging. There is a clear need for industry-wide standard ML benchmarking and evaluation criteria. MLPerf Inference answers that call. In this paper, we present our benchmarking method for evaluating ML inference systems. Driven by more than 30 organizations as well as more than 200 ML engineers and practitioners, MLPerf prescribes a set of rules and best practices to ensure comparability across systems with wildly differing architectures. The first call for submissions garnered more than 600 reproducible inference-performance measurements from 14 organizations, representing over 30 systems that showcase a wide range of capabilities. The submissions attest to the benchmark's flexibility and adaptability.
18 Oct 2024

Motion time series collected from mobile and wearable devices such as smartphones and smartwatches offer significant insights into human behavioral patterns, with wide applications in healthcare, automation, IoT, and AR/XR due to their low-power, always-on nature. However, given security and privacy concerns, building large-scale motion time series datasets remains difficult, preventing the development of pre-trained models for human activity analysis. Typically, existing models are trained and tested on the same dataset, leading to poor generalizability across variations in device location, device mounting orientation and human activity type. In this paper, we introduce UniMTS, the first unified pre-training procedure for motion time series that generalizes across diverse device latent factors and activities. Specifically, we employ a contrastive learning framework that aligns motion time series with text descriptions enriched by large language models. This helps the model learn the semantics of time series to generalize across activities. Given the absence of large-scale motion time series data, we derive and synthesize time series from existing motion skeleton data with all-joint coverage. Spatio-temporal graph networks are utilized to capture the relationships across joints for generalization across different device locations. We further design rotation-invariant augmentation to make the model agnostic to changes in device mounting orientations. Our model shows exceptional generalizability across 18 motion time series classification benchmark datasets, outperforming the best baselines by 340% in the zero-shot setting, 16.3% in the few-shot setting, and 9.2% in the full-shot setting.
06 Mar 2025
Northwestern Polytechnical University Northeastern University
Northeastern University Sun Yat-Sen UniversityGhent UniversityKorea University
Sun Yat-Sen UniversityGhent UniversityKorea University Nanjing University
Nanjing University Zhejiang University
Zhejiang University University of MichiganXidian UniversityUniversity of Electronic Science and Technology of ChinaCentral South UniversityUniversity of Hong KongTechnology Innovation Institute
University of MichiganXidian UniversityUniversity of Electronic Science and Technology of ChinaCentral South UniversityUniversity of Hong KongTechnology Innovation Institute Yale UniversityUniversitat Pompeu Fabra
Yale UniversityUniversitat Pompeu Fabra NVIDIA
NVIDIA Huawei
Huawei Nanyang Technological UniversityUniversity of GranadaChina TelecomUlsan National Institute of Science and Technology
Nanyang Technological UniversityUniversity of GranadaChina TelecomUlsan National Institute of Science and Technology King’s College LondonSingapore University of Technology and Design
King’s College LondonSingapore University of Technology and Design Aalto University
Aalto University Virginia TechUniversity of HoustonEast China Normal University
Virginia TechUniversity of HoustonEast China Normal University KTH Royal Institute of TechnologyUniversity of OuluKhalifa UniversityLightOnCentraleSupélecUniversity of LeedsIMECNokia Bell LabsCEA-LetiUniversity of YorkOrangeEricssonBrunel University LondonQualcommChina UnicomBubbleRANITUEMIRATES INTEGRATED TELECOMMUNICATIONS COMPANYFENTECHGSMARIMEDO LABSKATIMCHINA MOBILE COMMUNICATIONS CORPORATIONBeijing Institute of TechnologyEurécom
KTH Royal Institute of TechnologyUniversity of OuluKhalifa UniversityLightOnCentraleSupélecUniversity of LeedsIMECNokia Bell LabsCEA-LetiUniversity of YorkOrangeEricssonBrunel University LondonQualcommChina UnicomBubbleRANITUEMIRATES INTEGRATED TELECOMMUNICATIONS COMPANYFENTECHGSMARIMEDO LABSKATIMCHINA MOBILE COMMUNICATIONS CORPORATIONBeijing Institute of TechnologyEurécom
Northeastern UniversitySun Yat-Sen UniversityGhent UniversityKorea UniversityNanjing UniversityZhejiang UniversityUniversity of MichiganXidian UniversityUniversity of Electronic Science and Technology of ChinaCentral South UniversityUniversity of Hong KongTechnology Innovation InstituteYale UniversityUniversitat Pompeu FabraNVIDIAHuaweiNanyang Technological UniversityUniversity of GranadaChina TelecomUlsan National Institute of Science and TechnologyKing’s College LondonSingapore University of Technology and DesignAalto UniversityVirginia TechUniversity of HoustonEast China Normal UniversityKTH Royal Institute of TechnologyUniversity of OuluKhalifa UniversityLightOnCentraleSupélecUniversity of LeedsIMECNokia Bell LabsCEA-LetiUniversity of YorkOrangeEricssonBrunel University LondonQualcommChina UnicomBubbleRANITUEMIRATES INTEGRATED TELECOMMUNICATIONS COMPANYFENTECHGSMARIMEDO LABSKATIMCHINA MOBILE COMMUNICATIONS CORPORATIONBeijing Institute of TechnologyEurécom
A comprehensive white paper from the GenAINet Initiative introduces Large Telecom Models (LTMs) as a novel framework for integrating AI into telecommunications infrastructure, providing a detailed roadmap for innovation while addressing critical challenges in scalability, hardware requirements, and regulatory compliance through insights from a diverse coalition of academic, industry and regulatory experts.
26 May 2025



Semantic communication transmits the extracted features of information rather than raw data, significantly reducing redundancy, which is crucial for addressing spectrum and energy challenges in 6G networks. In this paper, we introduce semantic communication into a cellular vehicle-to-everything (C-V2X)- based autonomous vehicle platoon system for the first time, aiming to achieve efficient management of communication resources in a dynamic environment. Firstly, we construct a mathematical model for semantic communication in platoon systems, in which the DeepSC model and MU-DeepSC model are used to semantically encode and decode unimodal and multi-modal data, respectively. Then, we propose the quality of experience (QoE) metric based on semantic similarity and semantic rate. Meanwhile, we consider the success rate of semantic information transmission (SRS) metric to ensure the fairness of channel resource allocation. Next, the optimization problem is posed with the aim of maximizing the QoE in vehicle-to-vehicle (V2V) links while improving SRS. To solve this mixed integer nonlinear programming problem (MINLP) and adapt to time-varying channel conditions, the paper proposes a distributed semantic-aware multi-modal resource allocation (SAMRA) algorithm based on multi-agent reinforcement learning (MARL), referred to as SAMRAMARL. The algorithm can dynamically allocate channels and power and determine semantic symbol length based on the contextual importance of the transmitted information, ensuring efficient resource utilization. Finally, extensive simulations have demonstrated that SAMRAMARL outperforms existing methods, achieving significant gains in QoE, SRS, and communication delay in C-V2X platooning scenarios.
10 Apr 2024
This paper presents JPDVT, a novel framework that applies Denoising Diffusion Probabilistic Models and Vision Transformers to solve image and video jigsaw puzzles. The method achieves state-of-the-art performance on traditional puzzles while uniquely enabling the solution of masked puzzles, where the model simultaneously infers the correct positions and the content of missing pieces.
01 Aug 2025

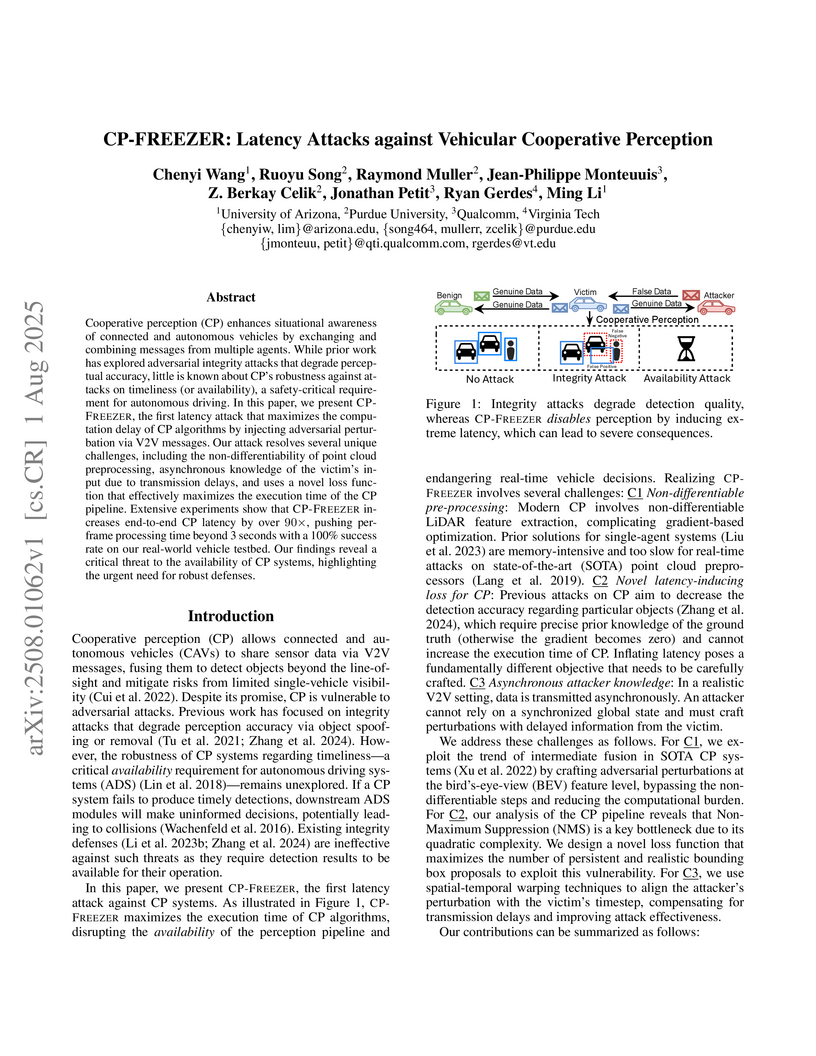
Cooperative perception (CP) enhances situational awareness of connected and autonomous vehicles by exchanging and combining messages from multiple agents. While prior work has explored adversarial integrity attacks that degrade perceptual accuracy, little is known about CP's robustness against attacks on timeliness (or availability), a safety-critical requirement for autonomous driving. In this paper, we present CP-FREEZER, the first latency attack that maximizes the computation delay of CP algorithms by injecting adversarial perturbation via V2V messages. Our attack resolves several unique challenges, including the non-differentiability of point cloud preprocessing, asynchronous knowledge of the victim's input due to transmission delays, and uses a novel loss function that effectively maximizes the execution time of the CP pipeline. Extensive experiments show that CP-FREEZER increases end-to-end CP latency by over , pushing per-frame processing time beyond 3 seconds with a 100% success rate on our real-world vehicle testbed. Our findings reveal a critical threat to the availability of CP systems, highlighting the urgent need for robust defenses.
19 Jun 2025
This letter proposes a semantic-aware resource allocation (SARA) framework with flexible duty cycle (DC) coexistence mechanism (SARADC) for 5G-V2X Heterogeneous Network (HetNets) based on deep reinforcement learning (DRL) proximal policy optimization (PPO). Specifically, we investigate V2X networks within a two-tiered HetNets structure. In response to the needs of high-speed vehicular networking in urban environments, we design a semantic communication system and introduce two resource allocation metrics: high-speed semantic transmission rate (HSR) and semantic spectrum efficiency (HSSE). Our main goal is to maximize HSSE. Additionally, we address the coexistence of vehicular users and WiFi users in 5G New Radio Unlicensed (NR-U) networks. To tackle this complex challenge, we propose a novel approach that jointly optimizes flexible DC coexistence mechanism and the allocation of resources and base stations (BSs). Unlike traditional bit transmission methods, our approach integrates the semantic communication paradigm into the communication system. Experimental results demonstrate that our proposed solution outperforms traditional bit transmission methods with traditional DC coexistence mechanism in terms of HSSE and semantic throughput (ST) for both vehicular and WiFi users.
03 May 2025
HybridGS introduces a framework that integrates generative and traditional point cloud compression techniques to address the large data size of 3D Gaussian Splatting (3DGS) models. It achieves high compression efficiency with fast encoding and decoding speeds through a dual-channel sparse representation and standard point cloud encoding, while maintaining visual quality across various datasets.

26 Nov 2025
A variational framework is developed here to quantize fermionic fields based on the extended stationary action principle. From the first principle, we successfully derive the well-known Floreanini-Jackiw representation of the Schrödinger equation for the wave functional of fermionic fields - an equation typically introduced as a postulate in standard canonical quantization. The derivation is accomplished through three key contributions. At the conceptual level, the classical stationary action principle is augmented to include a correction term based on the relative entropy arising from field fluctuations. Then, an extended canonical transformation for fermionic fields is formulated that leads to the quantum version of the Hamilton-Jacobi equation in a form consistent with the Floreanini-Jackiw representation; Third, necessary functional calculus with Grassmann-valued field variables is developed for the variation procedure. The quantized Hamiltonian can generate the Poincaré algebra, thus satisfying the symmetry requirements of special relativity. Concrete calculation of the probability of particle creation for the fermionic field under the influence of constant external field confirms that the results agree with those using standard canonical quantization. We also show that the framework can be applied to develop theories of interaction between fermionic fields and other external fields such as electromagnetic fields, non-Abelian gauge fields, or another fermionic field. These results further establish that the present variational framework is a novel alternative to derive quantum field theories.

12 May 2025
Motivated by hyper-reliable low-latency communication in 6G, we consider
error control coding for short block lengths in multi-antenna fading channels.
In general, the channel fading coefficients are unknown at both the transmitter
and receiver, which is referred to as non-coherent channels. Conventionally,
pilot symbols are transmitted to facilitate channel estimation, causing power
and bandwidth overhead. Our paper considers sparse regression codes (SPARCs)
for non-coherent flat-fading channels without using pilots. We develop a novel
greedy decoder for SPARC using maximum likelihood principles, referred to as
maximum likelihood matching pursuit (MLMP). MLMP works based on successive
combining principles as opposed to conventional greedy algorithms, which are
based on successive cancellation. We also obtain the noiseless perfect recovery
condition for our successive combining algorithm. In addition, we develop an
approximate message passing (AMP) SPARC decoder for the non-coherent flat
fading model. Using simulation studies, we show that the MLMP decoder for SPARC
outperforms AMP and other greedy decoders. Also, SPARC with MLMP decoder
outperforms polar codes employing pilot-based channel estimation and polar
codes with non-coherent decoders.
17 May 2021
Real-Time Video Super-Resolution on Smartphones with Deep Learning, Mobile AI 2021 Challenge: Report
Real-Time Video Super-Resolution on Smartphones with Deep Learning, Mobile AI 2021 Challenge: Report

Video super-resolution has recently become one of the most important mobile-related problems due to the rise of video communication and streaming services. While many solutions have been proposed for this task, the majority of them are too computationally expensive to run on portable devices with limited hardware resources. To address this problem, we introduce the first Mobile AI challenge, where the target is to develop an end-to-end deep learning-based video super-resolution solutions that can achieve a real-time performance on mobile GPUs. The participants were provided with the REDS dataset and trained their models to do an efficient 4X video upscaling. The runtime of all models was evaluated on the OPPO Find X2 smartphone with the Snapdragon 865 SoC capable of accelerating floating-point networks on its Adreno GPU. The proposed solutions are fully compatible with any mobile GPU and can upscale videos to HD resolution at up to 80 FPS while demonstrating high fidelity results. A detailed description of all models developed in the challenge is provided in this paper.

17 Jun 2025
As Internet of Vehicles (IoV) technology continues to advance, edge computing has become an important tool for assisting vehicles in handling complex tasks. However, the process of offloading tasks to edge servers may expose vehicles to malicious external attacks, resulting in information loss or even tampering, thereby creating serious security vulnerabilities. Blockchain technology can maintain a shared ledger among servers. In the Raft consensus mechanism, as long as more than half of the nodes remain operational, the system will not collapse, effectively maintaining the system's robustness and security. To protect vehicle information, we propose a security framework that integrates the Raft consensus mechanism from blockchain technology with edge computing. To address the additional latency introduced by blockchain, we derived a theoretical formula for system delay and proposed a convex optimization solution to minimize the system latency, ensuring that the system meets the requirements for low latency and high reliability. Simulation results demonstrate that the optimized data extraction rate significantly reduces system delay, with relatively stable variations in latency. Moreover, the proposed optimization solution based on this model can provide valuable insights for enhancing security and efficiency in future network environments, such as 5G and next-generation smart city systems.
24 Aug 2021
Advancements in ultra-low-power tiny machine learning (TinyML) systems promise to unlock an entirely new class of smart applications. However, continued progress is limited by the lack of a widely accepted and easily reproducible benchmark for these systems. To meet this need, we present MLPerf Tiny, the first industry-standard benchmark suite for ultra-low-power tiny machine learning systems. The benchmark suite is the collaborative effort of more than 50 organizations from industry and academia and reflects the needs of the community. MLPerf Tiny measures the accuracy, latency, and energy of machine learning inference to properly evaluate the tradeoffs between systems. Additionally, MLPerf Tiny implements a modular design that enables benchmark submitters to show the benefits of their product, regardless of where it falls on the ML deployment stack, in a fair and reproducible manner. The suite features four benchmarks: keyword spotting, visual wake words, image classification, and anomaly detection.

27 Feb 2025
3D part segmentation is still an open problem in the field of 3D vision and
AR/VR. Due to limited 3D labeled data, traditional supervised segmentation
methods fall short in generalizing to unseen shapes and categories. Recently,
the advancement in vision-language models' zero-shot abilities has brought a
surge in open-world 3D segmentation methods. While these methods show promising
results for 3D scenes or objects, they do not generalize well to 3D humans. In
this paper, we present the first open-vocabulary segmentation method capable of
handling 3D human. Our framework can segment the human category into desired
fine-grained parts based on the textual prompt. We design a simple segmentation
pipeline, leveraging SAM to generate multi-view proposals in 2D and proposing a
novel HumanCLIP model to create unified embeddings for visual and textual
inputs. Compared with existing pre-trained CLIP models, the HumanCLIP model
yields more accurate embeddings for human-centric contents. We also design a
simple-yet-effective MaskFusion module, which classifies and fuses multi-view
features into 3D semantic masks without complex voting and grouping mechanisms.
The design of decoupling mask proposals and text input also significantly
boosts the efficiency of per-prompt inference. Experimental results on various
3D human datasets show that our method outperforms current state-of-the-art
open-vocabulary 3D segmentation methods by a large margin. In addition, we show
that our method can be directly applied to various 3D representations including
meshes, point clouds, and 3D Gaussian Splatting.
08 Nov 2024
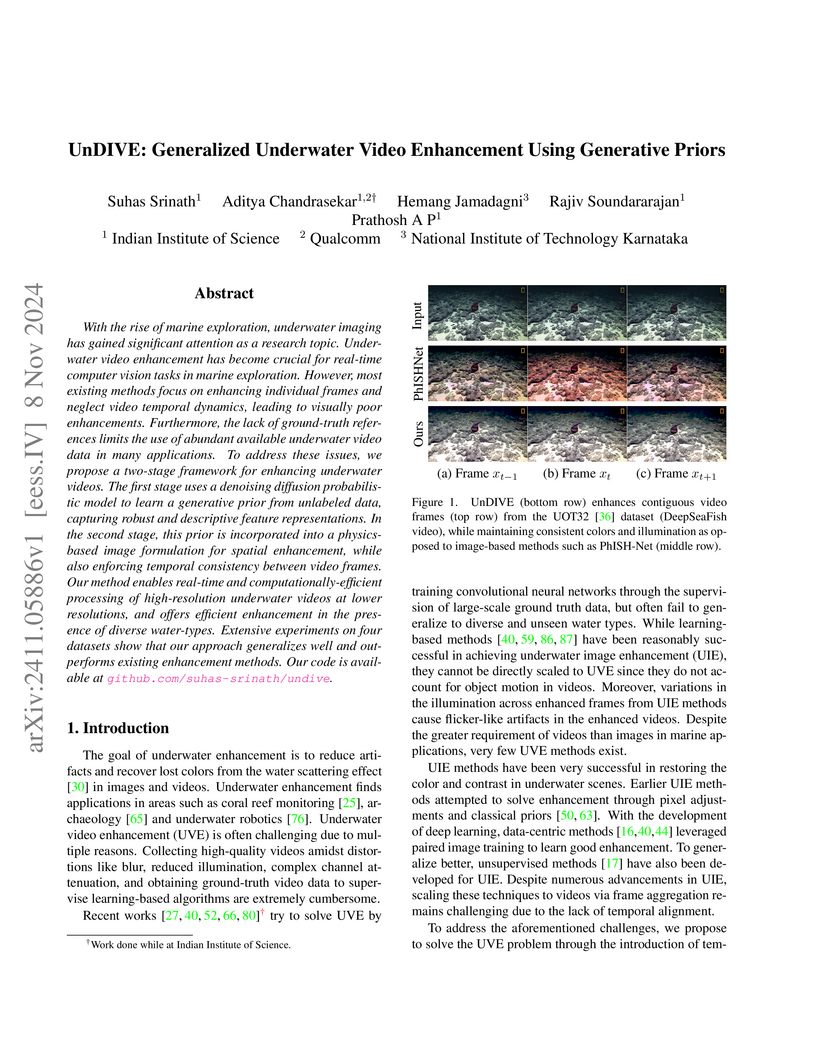
Researchers from the Indian Institute of Science developed UnDIVE, a two-stage framework that enhances underwater videos by combining generative priors learned from unlabeled data with a physics-based model and temporal consistency constraints. The approach yields improved color, contrast, and visibility with reduced flickering across diverse underwater environments.
29 May 2024

Semantic Bird's Eye View (BEV) maps offer a rich representation with strong occlusion reasoning for various decision making tasks in autonomous driving. However, most BEV mapping approaches employ a fully supervised learning paradigm that relies on large amounts of human-annotated BEV ground truth data. In this work, we address this limitation by proposing the first unsupervised representation learning approach to generate semantic BEV maps from a monocular frontal view (FV) image in a label-efficient manner. Our approach pretrains the network to independently reason about scene geometry and scene semantics using two disjoint neural pathways in an unsupervised manner and then finetunes it for the task of semantic BEV mapping using only a small fraction of labels in the BEV. We achieve label-free pretraining by exploiting spatial and temporal consistency of FV images to learn scene geometry while relying on a novel temporal masked autoencoder formulation to encode the scene representation. Extensive evaluations on the KITTI-360 and nuScenes datasets demonstrate that our approach performs on par with the existing state-of-the-art approaches while using only 1% of BEV labels and no additional labeled data.

06 Apr 2022
This paper presents the first industry-standard open-source machine learning (ML) benchmark to allow perfor mance and accuracy evaluation of mobile devices with different AI chips and software stacks. The benchmark draws from the expertise of leading mobile-SoC vendors, ML-framework providers, and model producers. It comprises a suite of models that operate with standard data sets, quality metrics and run rules. We describe the design and implementation of this domain-specific ML benchmark. The current benchmark version comes as a mobile app for different computer vision and natural language processing tasks. The benchmark also supports non-smartphone devices, such as laptops and mobile PCs. Benchmark results from the first two rounds reveal the overwhelming complexity of the underlying mobile ML system stack, emphasizing the need for transparency in mobile ML performance analysis. The results also show that the strides being made all through the ML stack improve performance. Within six months, offline throughput improved by 3x, while latency reduced by as much as 12x. ML is an evolving field with changing use cases, models, data sets and quality targets. MLPerf Mobile will evolve and serve as an open-source community framework to guide research and innovation for mobile AI.

31 Oct 2025


MLPerf Automotive introduces the first standardized public benchmark for evaluating machine learning systems in autonomous vehicles, addressing unique industry requirements for safety, real-time performance, and longevity. It defines specific perception tasks using relevant datasets and stringent metrics like 99.9% tail latency, facilitating fair and reproducible comparisons across diverse hardware and software.
13 Aug 2021



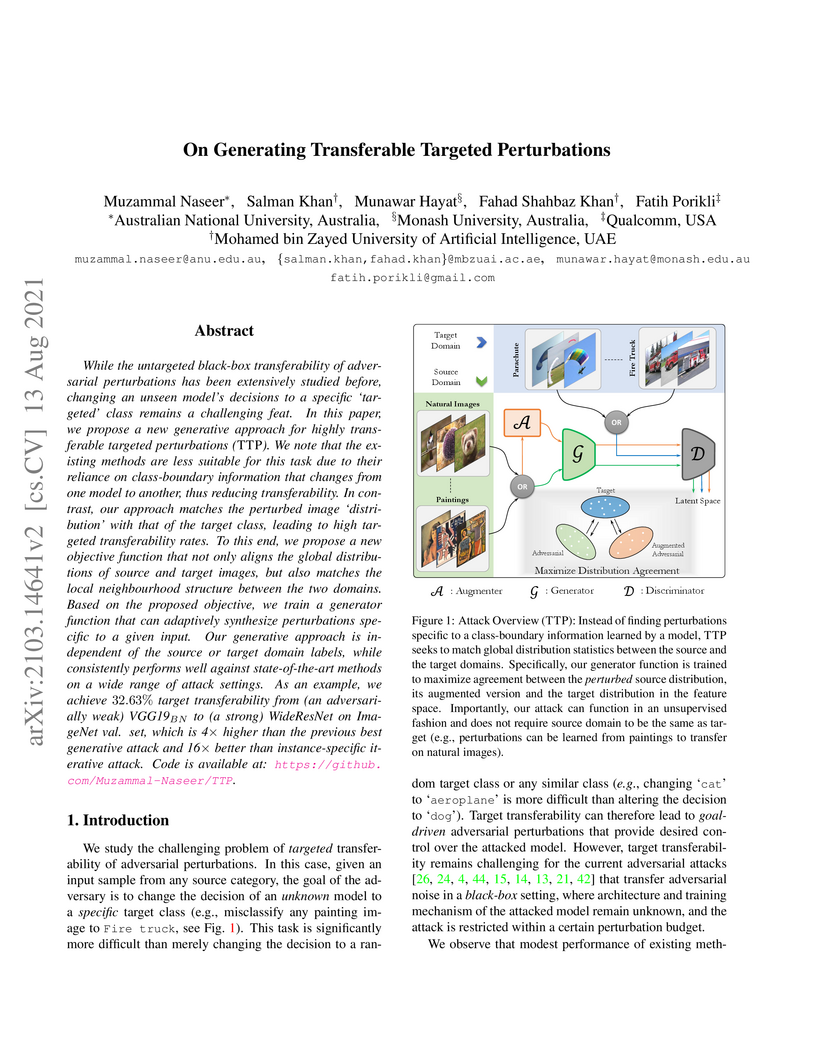
While the untargeted black-box transferability of adversarial perturbations has been extensively studied before, changing an unseen model's decisions to a specific `targeted' class remains a challenging feat. In this paper, we propose a new generative approach for highly transferable targeted perturbations (\ours). We note that the existing methods are less suitable for this task due to their reliance on class-boundary information that changes from one model to another, thus reducing transferability. In contrast, our approach matches the perturbed image `distribution' with that of the target class, leading to high targeted transferability rates. To this end, we propose a new objective function that not only aligns the global distributions of source and target images, but also matches the local neighbourhood structure between the two domains. Based on the proposed objective, we train a generator function that can adaptively synthesize perturbations specific to a given input. Our generative approach is independent of the source or target domain labels, while consistently performs well against state-of-the-art methods on a wide range of attack settings. As an example, we achieve target transferability from (an adversarially weak) VGG19 to (a strong) WideResNet on ImageNet val. set, which is 4 higher than the previous best generative attack and 16 better than instance-specific iterative attack. Code is available at: {\small\url{this https URL}}.

12 Apr 2023

Neural Architecture Search (NAS) is widely used to automatically obtain the neural network with the best performance among a large number of candidate architectures. To reduce the search time, zero-shot NAS aims at designing training-free proxies that can predict the test performance of a given architecture. However, as shown recently, none of the zero-shot proxies proposed to date can actually work consistently better than a naive proxy, namely, the number of network parameters (#Params). To improve this state of affairs, as the main theoretical contribution, we first reveal how some specific gradient properties across different samples impact the convergence rate and generalization capacity of neural networks. Based on this theoretical analysis, we propose a new zero-shot proxy, ZiCo, the first proxy that works consistently better than #Params. We demonstrate that ZiCo works better than State-Of-The-Art (SOTA) proxies on several popular NAS-Benchmarks (NASBench101, NATSBench-SSS/TSS, TransNASBench-101) for multiple applications (e.g., image classification/reconstruction and pixel-level prediction). Finally, we demonstrate that the optimal architectures found via ZiCo are as competitive as the ones found by one-shot and multi-shot NAS methods, but with much less search time. For example, ZiCo-based NAS can find optimal architectures with 78.1%, 79.4%, and 80.4% test accuracy under inference budgets of 450M, 600M, and 1000M FLOPs, respectively, on ImageNet within 0.4 GPU days. Our code is available at this https URL.
There are no more papers matching your filters at the moment.
